Three-degree-of-freedom parallel mechanism type dual head for five-axis machine tools and control method
A dual-swing, degree-of-freedom technology used in manufacturing tools, metalworking machine parts, large fixed members, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
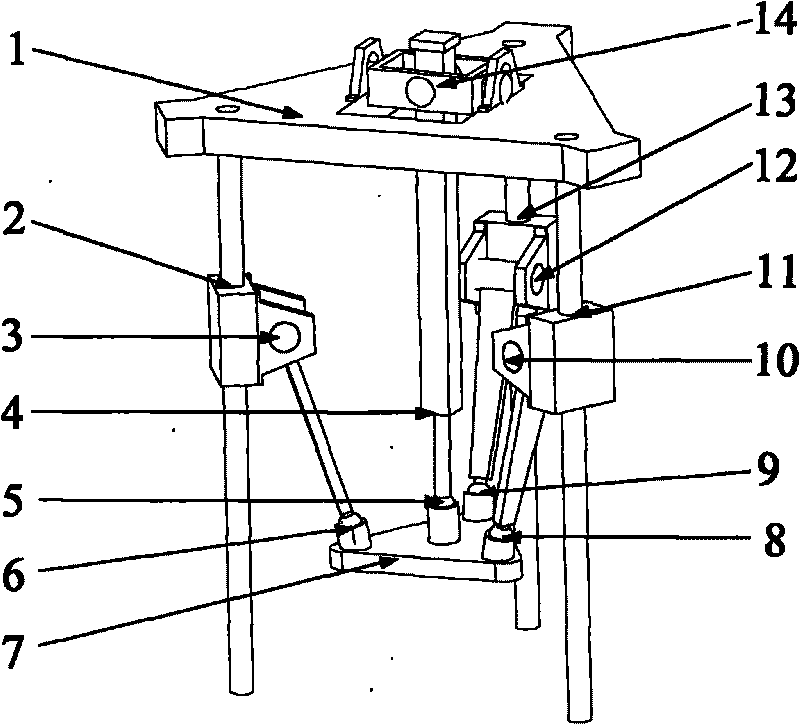
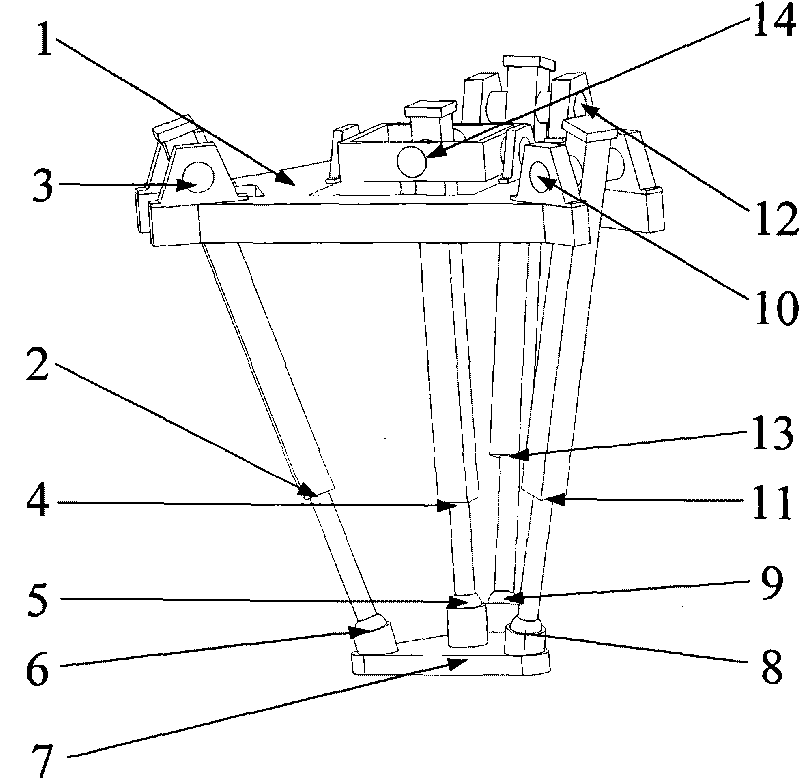
[0039] The double-swing head of a five-axis machine tool in the form of a three-degree-of-freedom parallel mechanism of the present invention is composed of a static platform 1, a dynamic platform 7 and four branch chains connecting the two platforms. The position and connection relationship between them are: the static platform 1. The dynamic platform 7 is a similar equilateral triangle with different sizes, in which the static platform 1 has a fixed posture, and the dynamic platform 7 has three degrees of freedom of movement relative to the static platform 1, including one movement and two rotations. Among the four branch chains, three branch chains have the same structural form, respectively connecting the vertices of the static platform 1 and the dynamic platform 7, and the other branch chain connects the centers of the static platform 1 and the dynamic platform 7.
[0040] The shape of the static platform 1 is an equilateral triangle, and the four branch chains are respect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com