Method for planning walking path and navigation method for avoiding dynamic barrier
A dynamic obstacle and path planning technology, applied in the field of navigation to avoid dynamic obstacles, can solve problems such as being unable to reach the destination point and avoiding obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
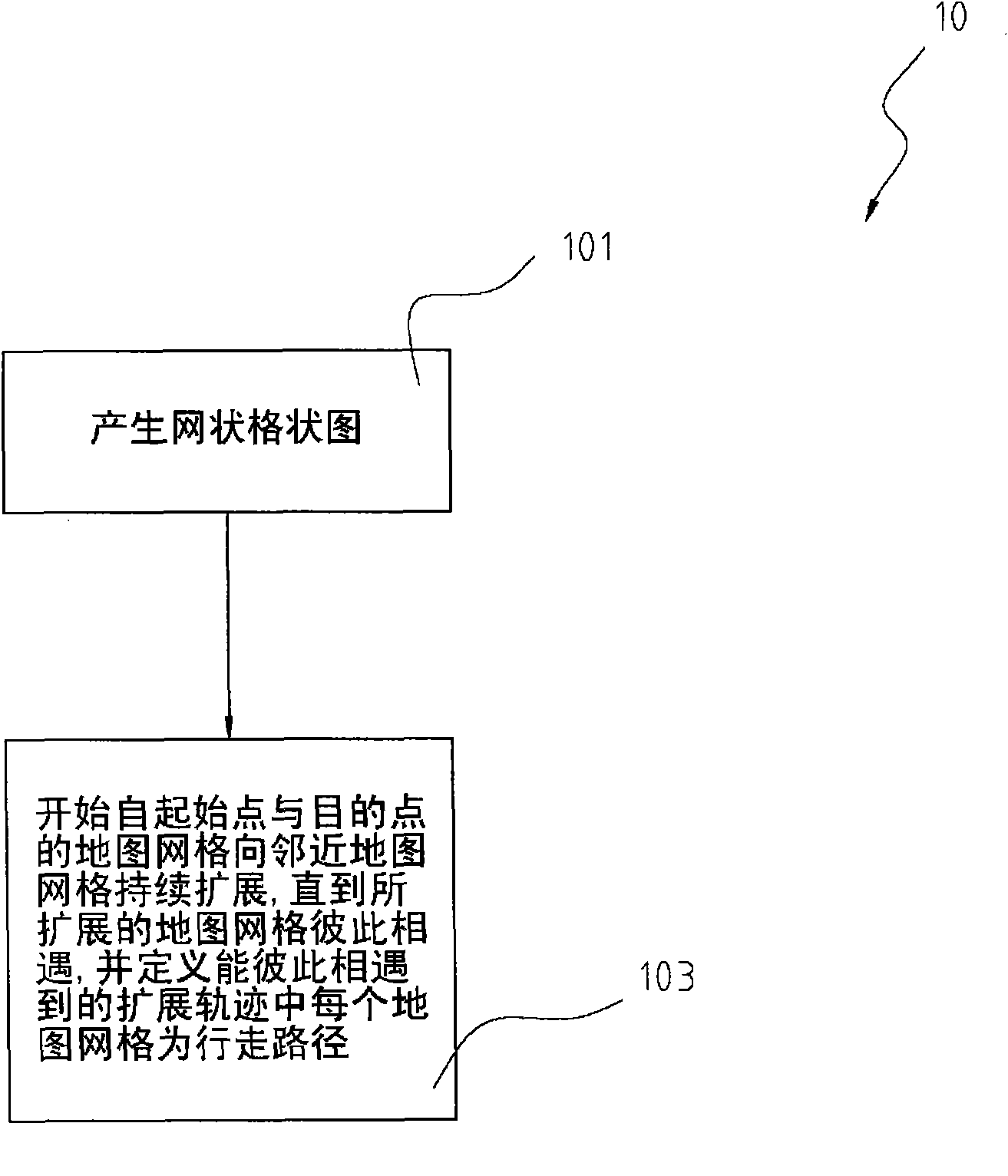
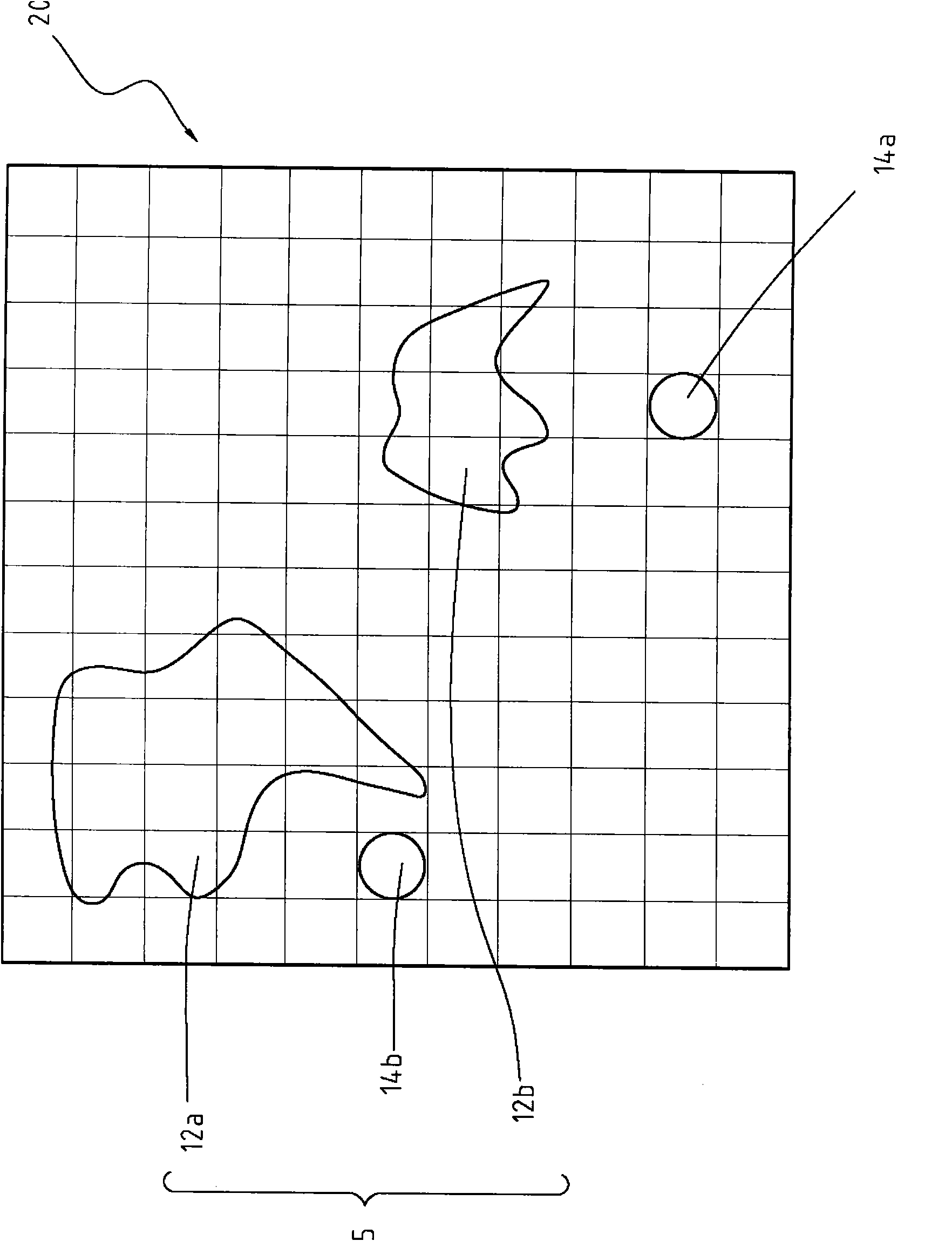
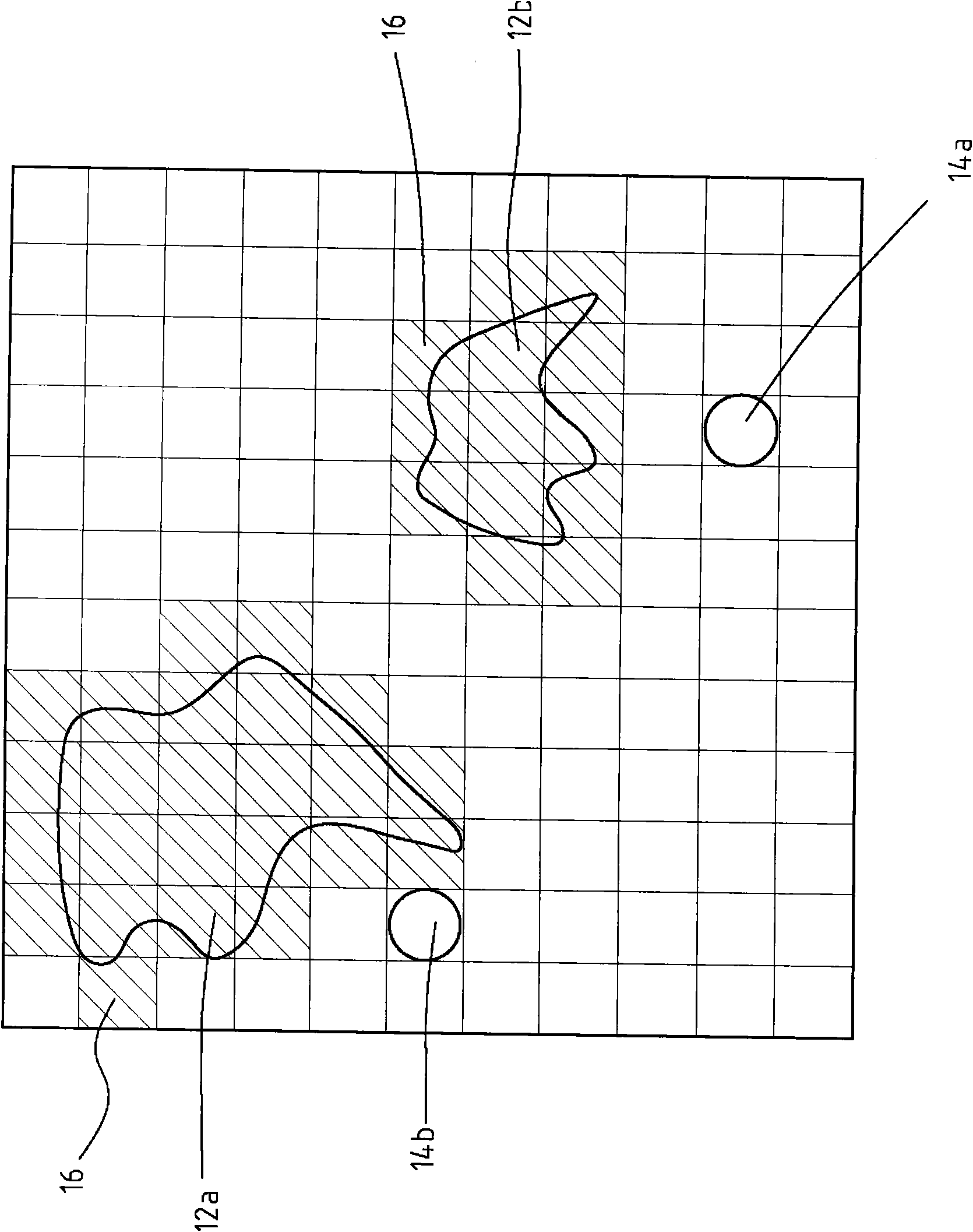
[0038] figure 1 A flow chart showing the walking path planning method for a self-propelled machine device of the present invention, and Figure 2A to Figure 2D A schematic diagram showing the implementation of the walking route planning method in a physical place according to the present invention. The walking path planning method 10 for a self-propelled robot device of the present invention includes step 101 and step 103 . Step 101 is based on a physical site 5 to generate a relative grid grid diagram 20, the grid grid diagram 20 includes a plurality of map grids (Map grid) 201 with obstacle parameter values, wherein each map grid 201 The obstacle parameter value is dependent on the position of the obstacle in the physical location 5 in relative position.
[0039] See Figure 2A In order to enable a self-propelled robotic device (not shown) (such as a robot) to move in the physical location 5 (such as a factory) according to the planning result of the walking path, the phy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com