


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Obstacle detection and avoidance method in multi-robot system
An obstacle detection, multi-robot technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] Taking five Pioneer 3dx robots as the research object, the effective method of multi-robot control is discussed. The software "V-REP" provided by CoppeliaRobotics GmbH was used to simulate these robots.
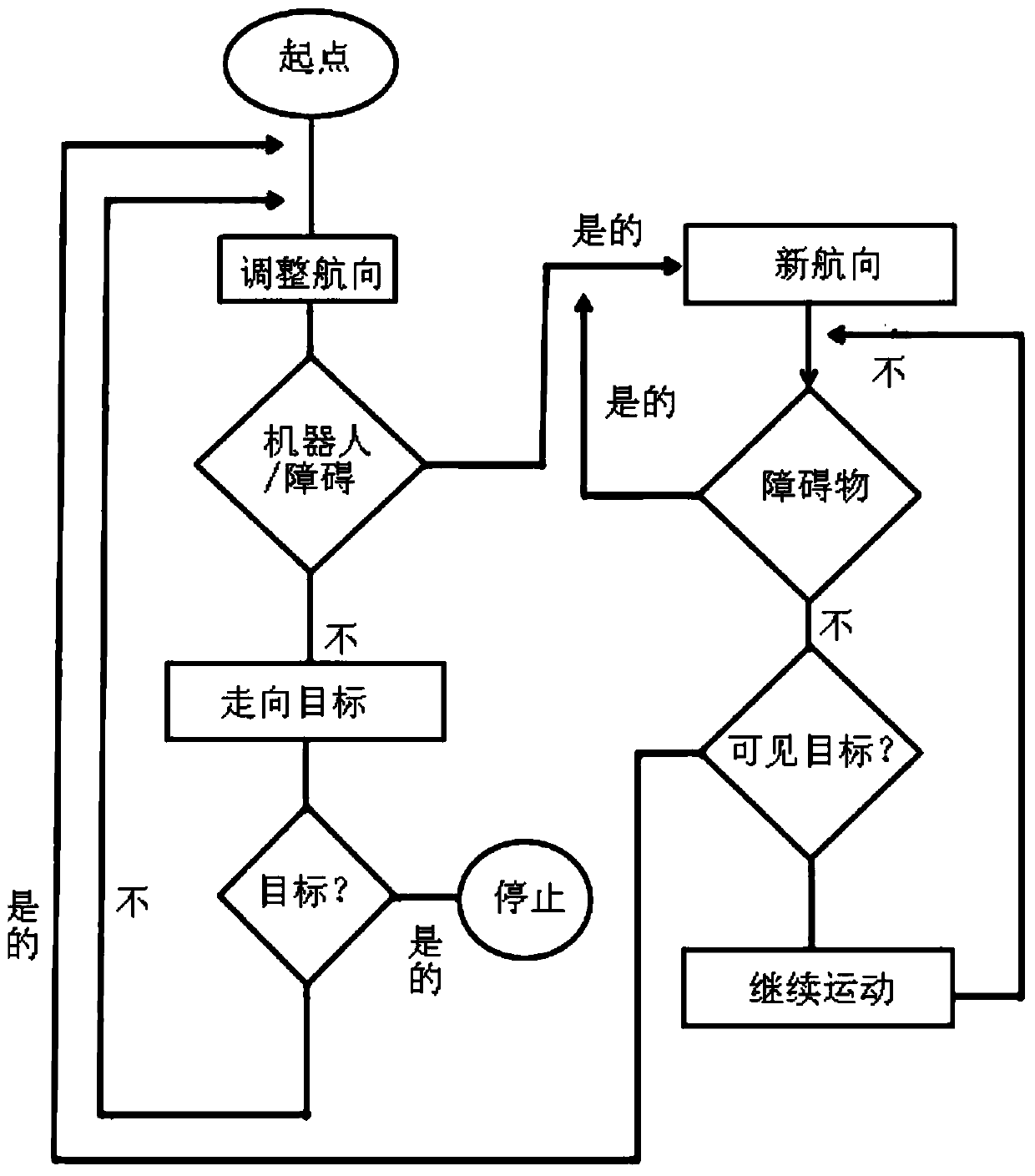
[0036] Such as figure 1 As shown, the robot starts to move and adjust its heading.
[0037] (1) The robot sensor starts to detect the environment and perceive whether the obstacle is a static or dynamic obstacle.
[0038] (2) If the sensor detects any static or dynamic obstacles that the robot passes by. Then stop moving, adjust the course according to the situation, and start exploring the environment again to find the target.
[0039] (3) If the target is not visible, it will continue to move, adjust their orientation, explore the environment, and move towards the target. It will repeat these steps until it reaches the target point.
[0040] (4) If the target is visible, it will start moving again, calculate the new rebound angle through equations (1) to (3) to ...
Embodiment 2
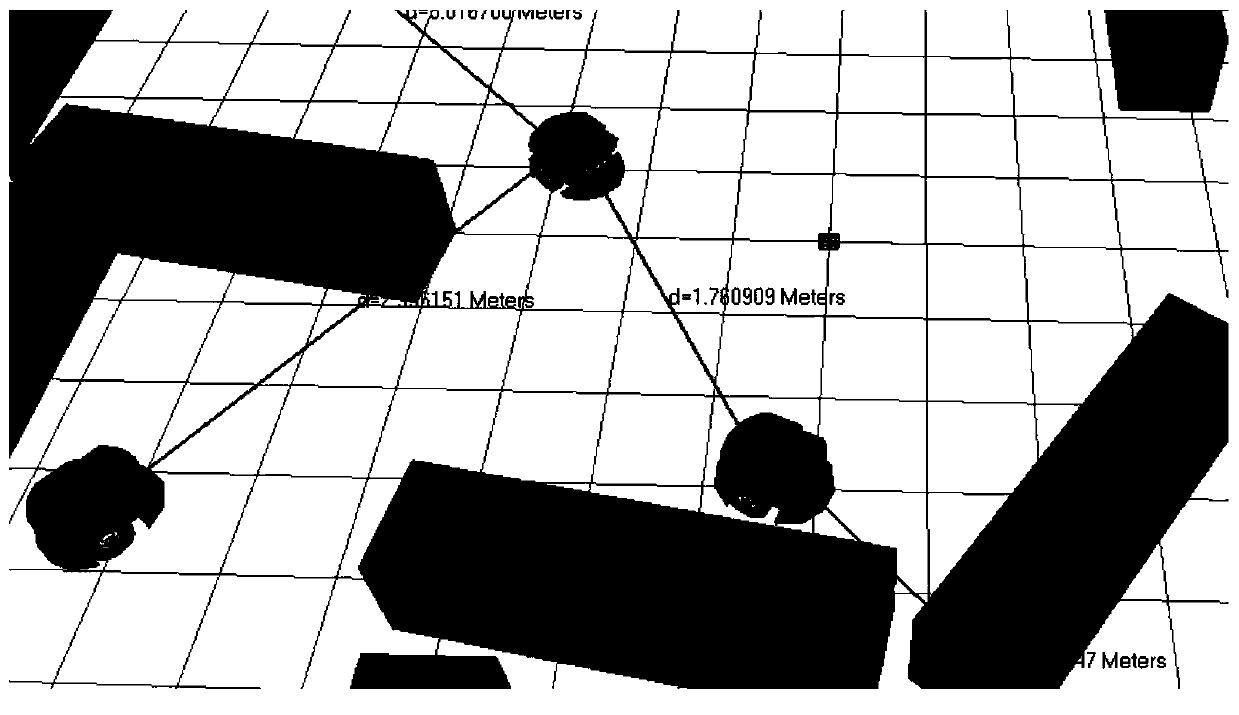
[0045] In this case, as figure 2 As shown, collision prevention between two robots is examined, considering each robot as an interrelated moving obstacle.
[0046] As the robots travel in each other's direction, each robot's sonar sensors transmit sound waves that then collide with another dynamic obstacle or robot, bouncing back to indicate how far the robots are.
[0047] When two robots move toward each other less than the edge (threshold) range, they move toward target points that are far away from each other and have a low chance of colliding.
Embodiment 3
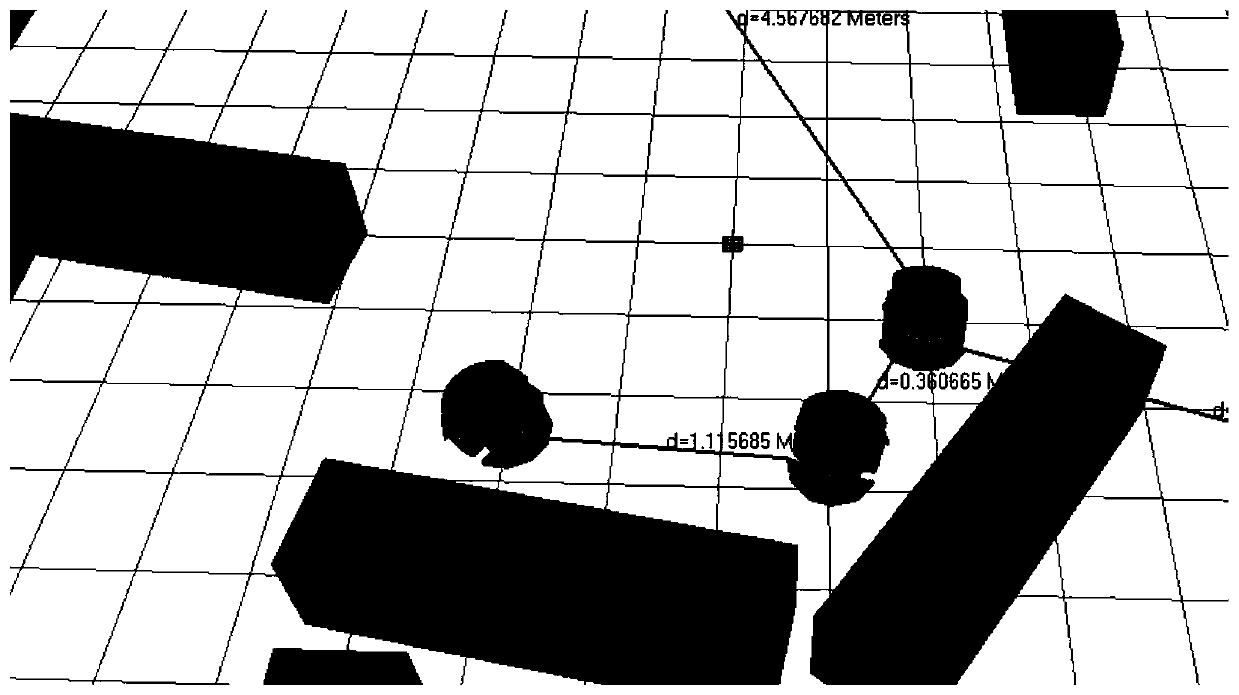
[0049] image 3 Collision avoidance between the robot and an obstacle (static obstacle) is shown. When multiple robots are heading in the direction of an obstacle, it also calculates the distance between each other and static obstacles using sonar sensors evenly placed on them.
[0050] Once the distance between these static obstacles and the robot is below the minimum threshold distance of 2 meters, the robots will move away from the obstacle in the direction of the target point.
[0051] Mobile robots directly rely on the sensors used in this scheme. Various simulations were performed and results were obtained that were consistent with theory and suggested interpretations. It can also be applied in concrete cases as in external scenarios.
[0052] Therefore, how to prevent collisions between robots and between robots and other types of obstacles in the environment is a key issue in robotics research.
[0053] The invention achieves results in two cases, where the first c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com