


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Distributed unmanned aerial vehicle queue and dynamic obstacle avoidance control method
A control method and dynamic obstacle avoidance technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve the difficulty of real-time guarantee, the difficulty of proving stability, and the requirements of UAV tracking performance. Higher and other problems to achieve the effect of avoiding dynamic obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
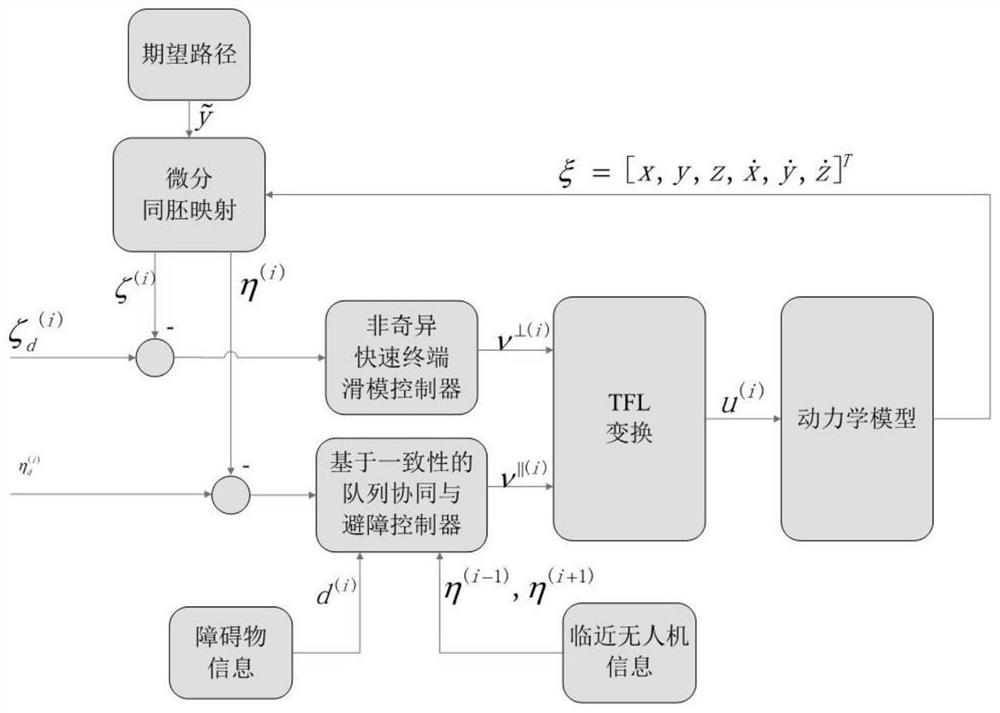
[0052] In order to overcome the deficiencies of the existing technology, the present invention aims to design a multi-UAV cooperative control and obstacle avoidance algorithm based on sliding mode and consensus protocol, so as to realize the cooperative obstacle avoidance on the UAV cluster cruising task and cruising path. The technical scheme adopted in the present invention is to adopt Transverse Feedback Linearization (TFL) method to carry out diffeomorphic mapping transformation to the dynamic model of the quadrotor UAV, so that it can be decomposed into tangential subsystems along the desired path direction and the desired path Intersecting lateral subsystems, and then design non-singular fast terminal sliding mode controllers in the lateral subsystems to make the motion of the UAV converge to the desired path, and design a synergy and The obstacle avoidance control algorithm realizes multi-UAV cooperative cruise mission and dynamic obstacle avoidance during cruise.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com