Bionic binocular stereovision apparatus
A technology of binocular stereo vision and connecting rod, which is applied in the field of robotics, can solve the problems of many calibration tasks and increase the complexity of the system, and achieve the effect of reducing the number, expanding the application prospect and compact mechanism.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The embodiments of the present invention will be further described in detail below with reference to the drawings: this embodiment is implemented on the premise of the solution of the present invention, and detailed implementation manners are given, but the protection scope of the present invention is not limited to the following embodiments.
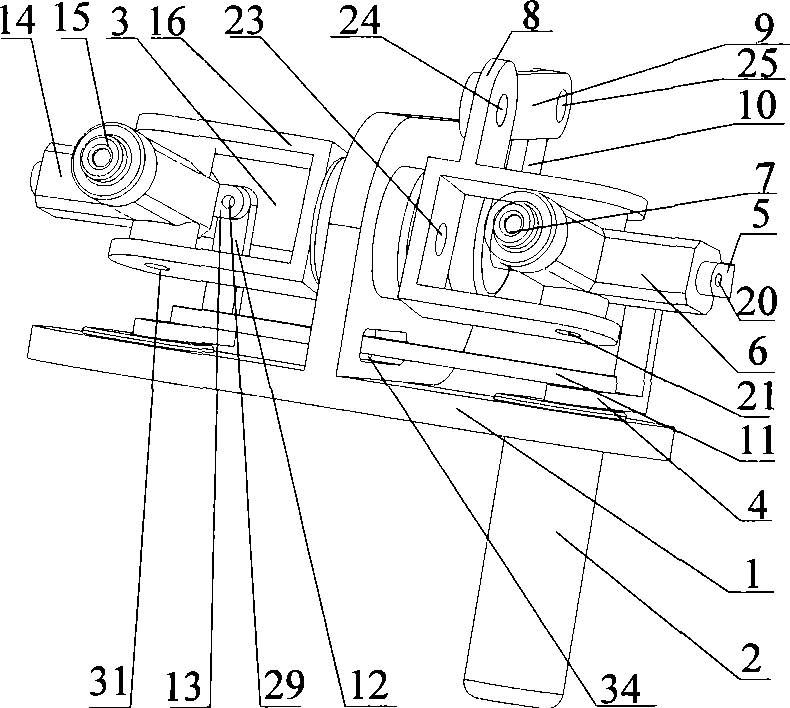
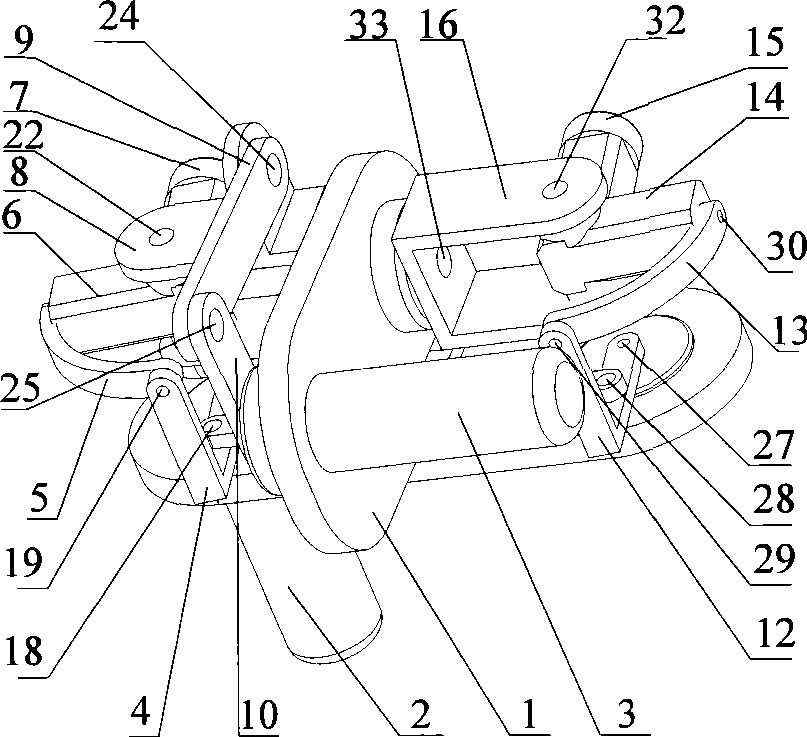
[0016] Such as Figure 1-3 As shown, this embodiment includes the following components: a base 1, a U-shaped piece 8, two cameras 7, 15, four driving swing rods 4, 10, 12, 16, two motors 2, 3, and six connecting rods 5, 6, 9, 11, 13, 14, also contain some commonly used connecting parts, such as rotating joints 17-33. The two motors 2 and 3 are arranged on the base 1, the base 1 and the second link 6 provided with the camera 7 are connected by two branches, and the base 1 and the sixth link 14 provided with the camera 15 pass through The two branches are connected. among them:
[0017] The two branches containing camera 7 are as follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com