Three-freedom recovery exercising robot
A technology for rehabilitation training and robotics, which is applied in the direction of manipulators, gymnastics equipment, passive exercise equipment, etc., can solve the problems of high labor intensity, high cost, single function, etc., to reduce labor intensity, reduce strength requirements, and good dynamic characteristics Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
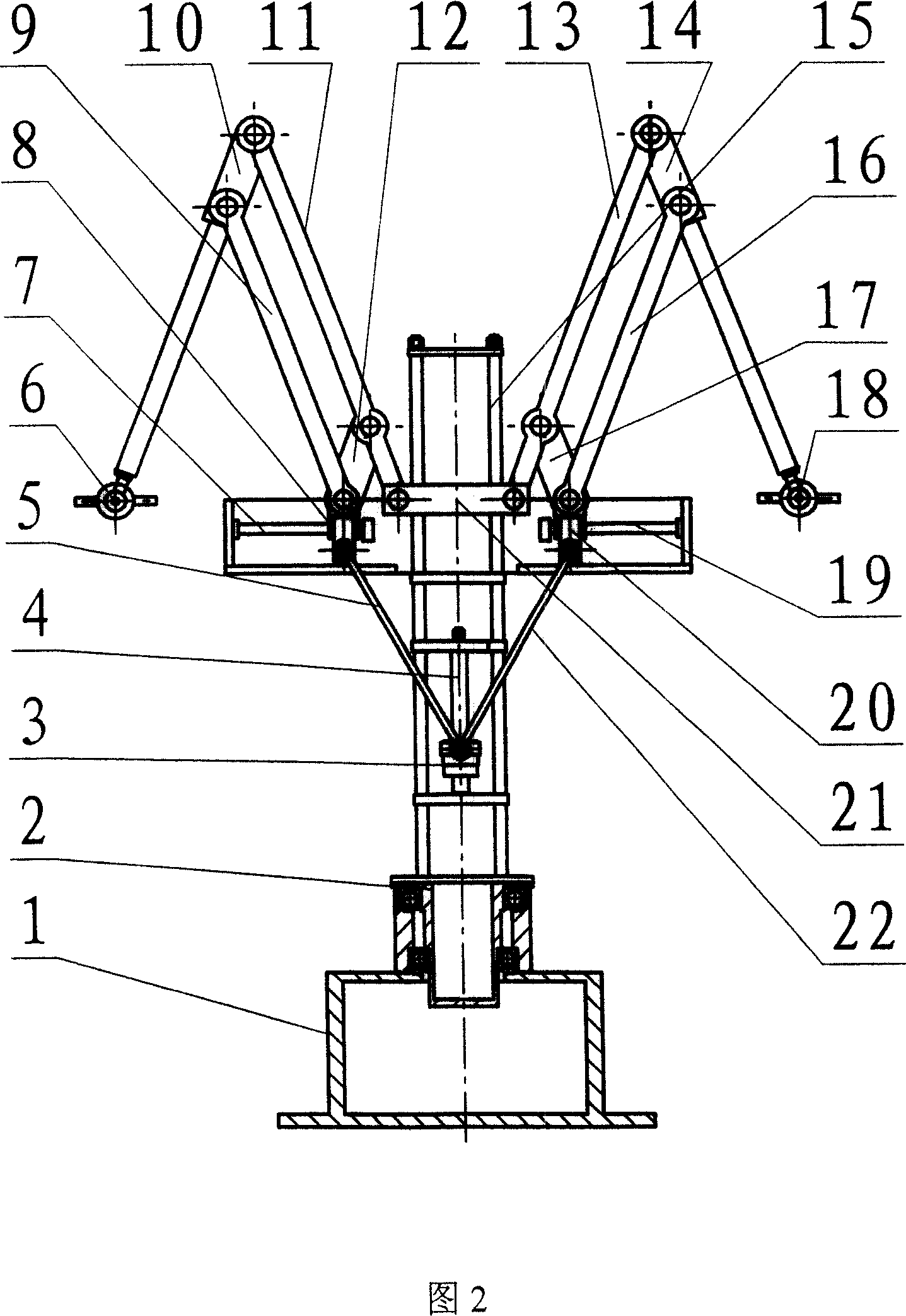
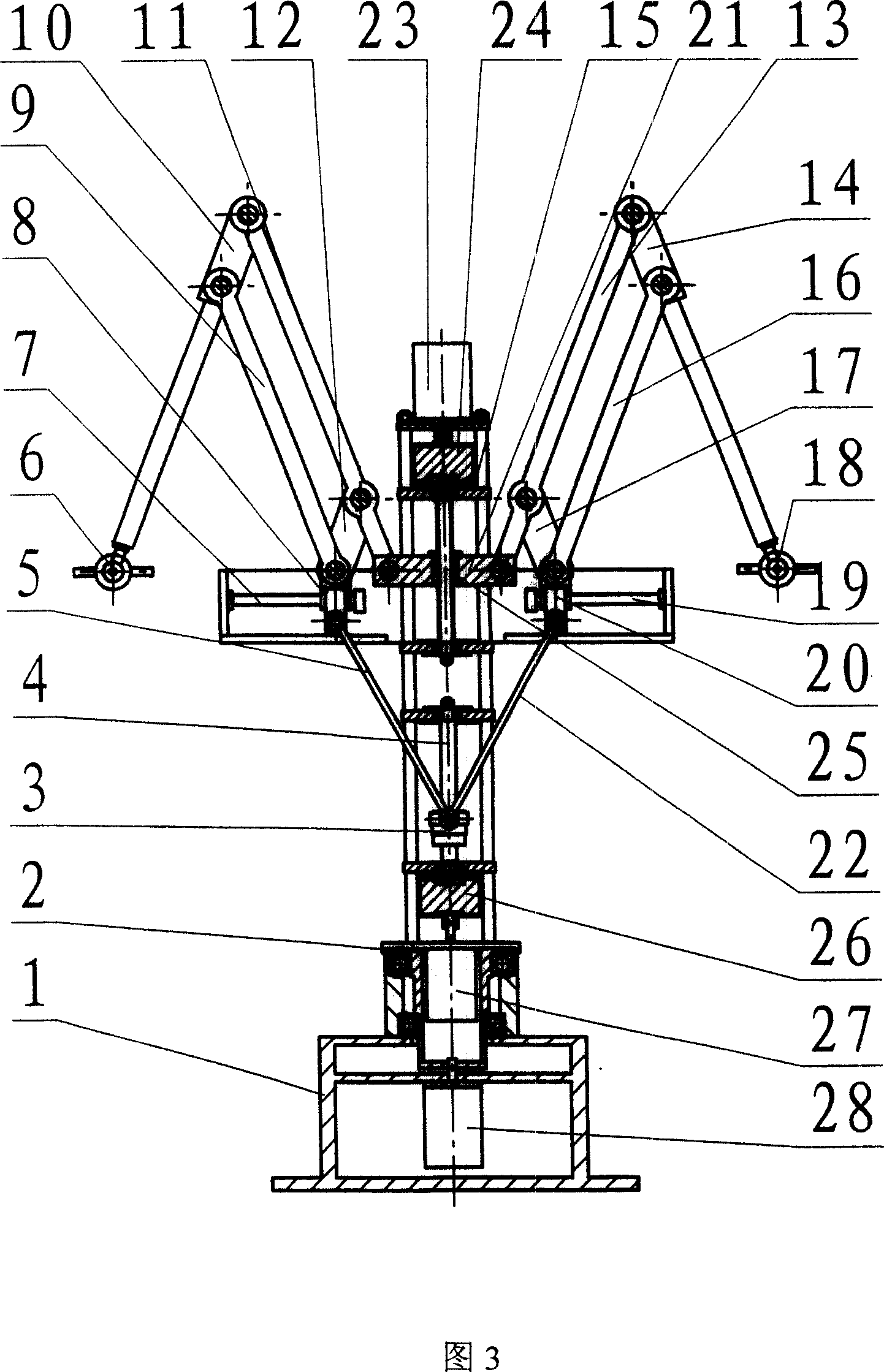
[0023] Referring to Fig. 1, a three-degree-of-freedom rehabilitation training robot for limb rehabilitation training includes a parallelogram mechanism consisting of two long rods 13, 16 and two short rods 14, 17 connected head to tail. One end of one of the long rods 13 is connected with an extension rod and the extension rod is connected to the vertical motion output end of the vertical motion mechanism, and the short rod 17 connected with the other end of the long rod 13 connected with the extension rod is connected with a rehabilitation training end 18. The other end of the short rod 17 connected to one end of the long rod 13 connected with the extension rod is connected to the horizontal motion output end of the horizontal motion mechanism. The above-mentioned vertical motion mechanism and horizontal motion mechanism are arranged on the turntable 2, and the turntable 2 is connected to the The rotary output of the rotary mechanism.
[0024] Above-mentioned vertical motion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com