Active-passive mixed-connected robot with nine degrees of freedom
A degree of freedom, active and passive technology, applied in the direction of surgical robots, manipulators, program-controlled manipulators, etc., can solve the problems of joint accumulation error, less flexible posture, small work space, etc., and achieve the effect of small joint accumulation error and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
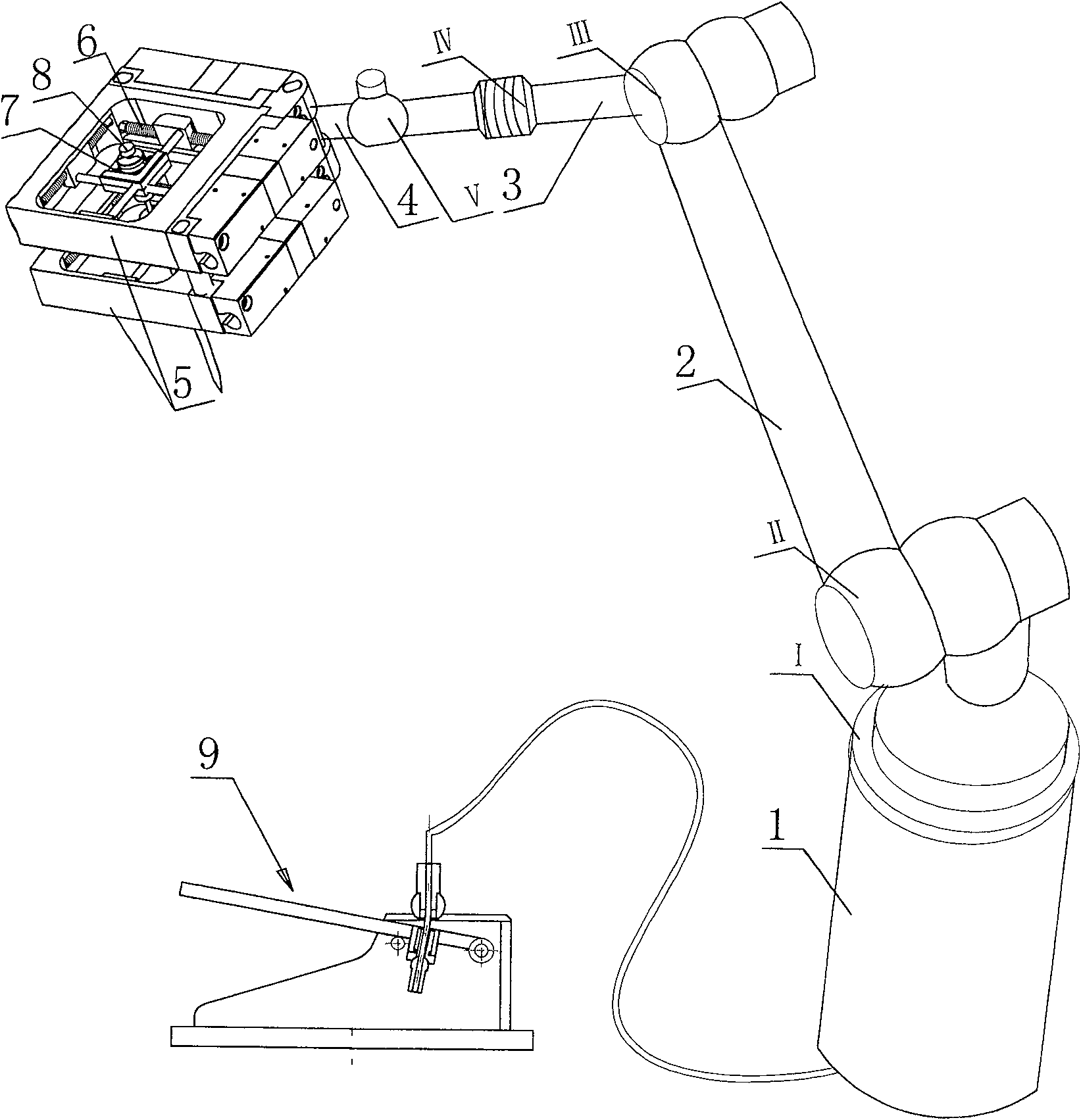
[0017] The active and passive combined nine-degree-of-freedom hybrid robot of the present invention, its preferred specific implementation is as follows figure 1 As shown, it includes a series mechanism and a parallel mechanism. The series mechanism is a passive mechanism with five rotational degrees of freedom. The series mechanism includes a base 1, a large arm 2, a small arm 3, and a loop joint 4 that are sequentially hinged; the parallel mechanism includes The double-plane static platform 5 and the needle holder 8 are connected to the looper joint 4, and the upper and lower parts of the needle holder 8 are respectively connected to the upper and lower plane static platforms of the double-plane static platform 5 through the mobile device .
[0018] The base 1 and the big arm 2 of the specific series mechanism are hinged through the first joint I and the second joint II, the rotation axis of the first joint I is vertical, and the rotation axis of the second joint II is horiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com