Flexible and remote-controlled operation platform for robot based on virtual reality
An operating platform and dexterous hand technology, applied in manipulators, manufacturing tools, etc., can solve the problems of many system links, large errors, poor operability, etc., and achieve the effect of reducing control links, improving control response speed, and reducing hardware and software costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] A preferred embodiment of the present invention is described in detail as follows in conjunction with accompanying drawing:
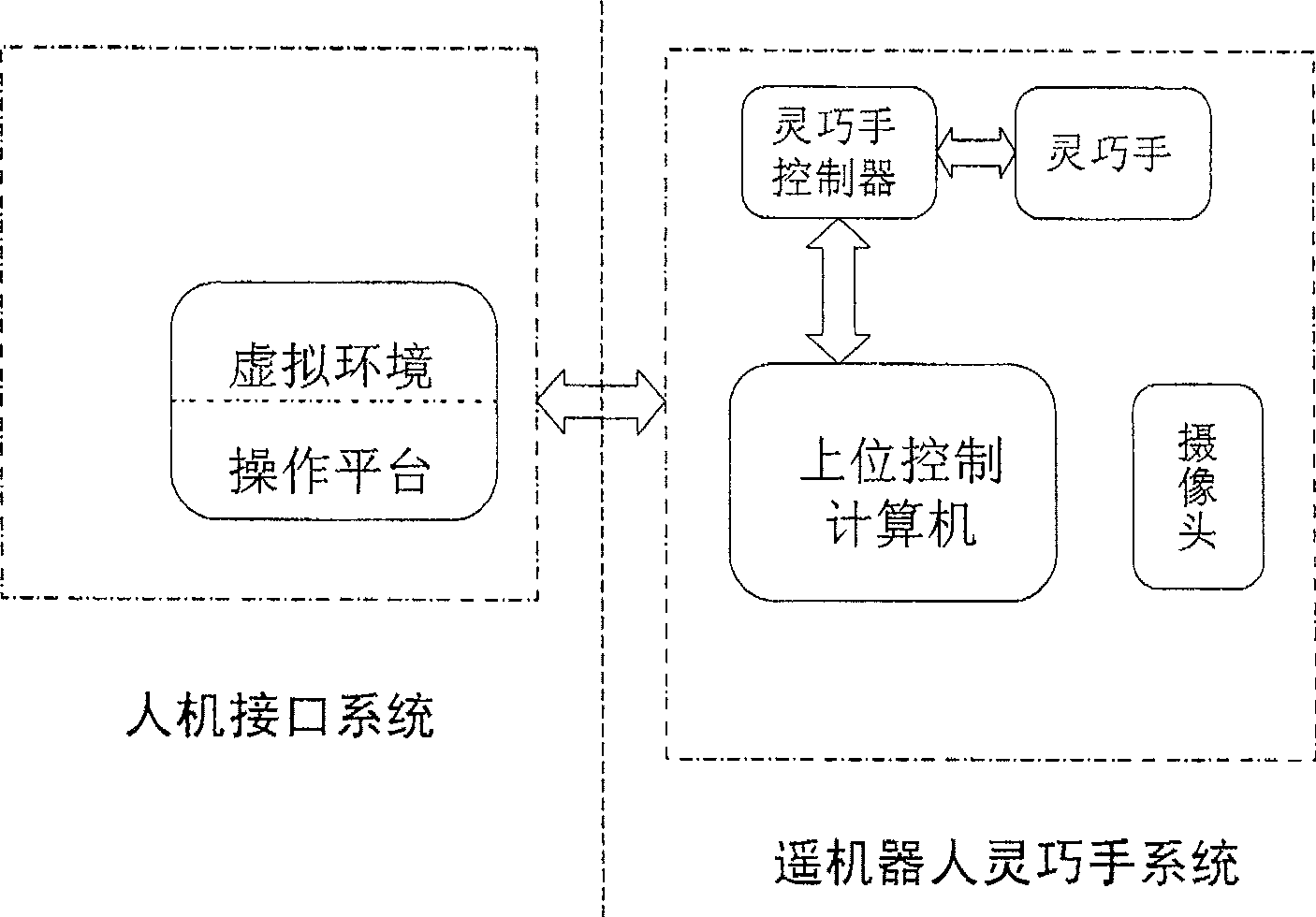
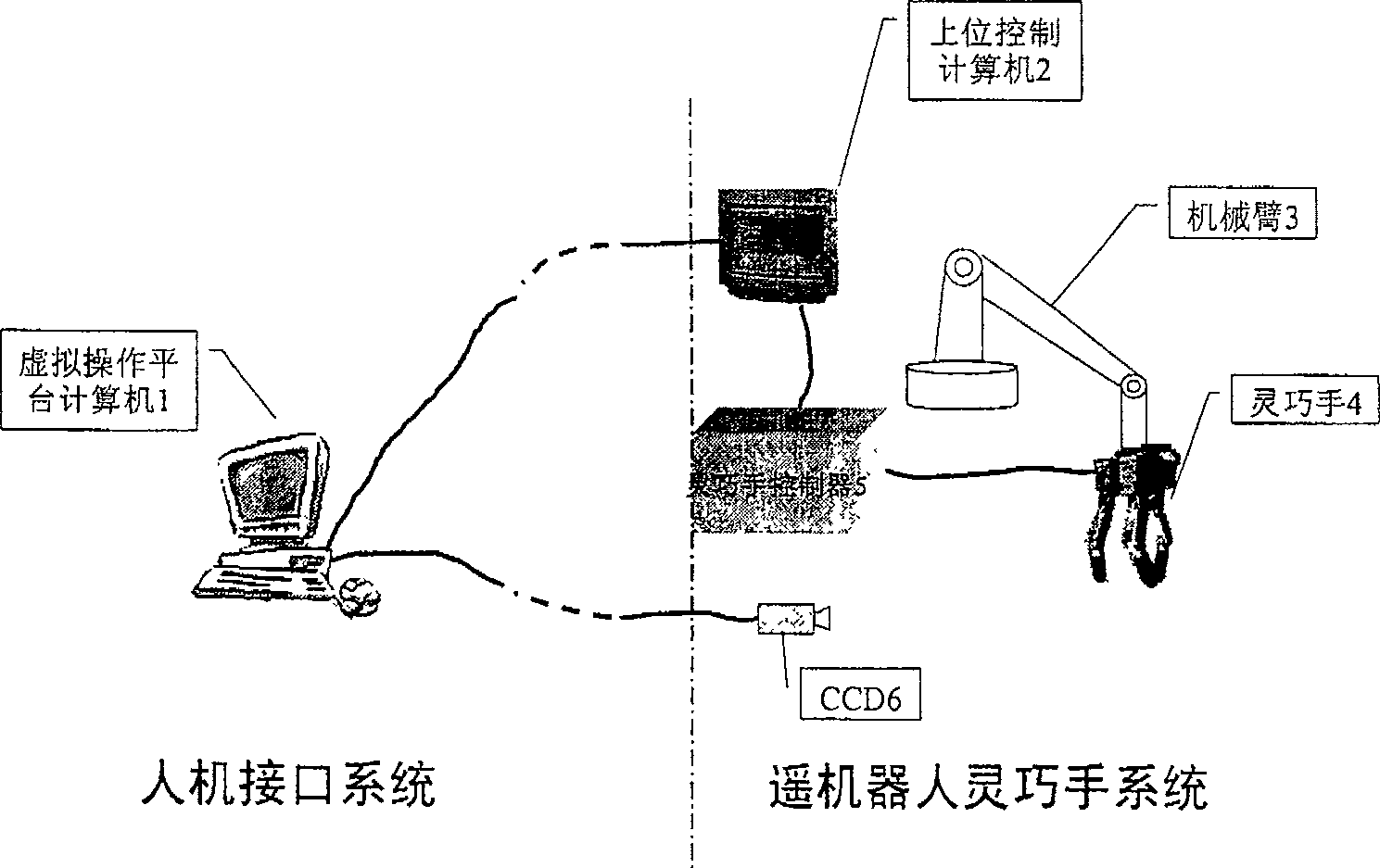
[0028] This is based on the virtual reality robot dexterous hand teleoperation platform such as figure 2 Shown: virtual operating platform computer as a human-machine interface system. The remote robot dexterous hand system consists of a host control computer, a BH-3 three-finger nine-degree-of-freedom robot dexterous hand of Beihang University, its controller, and a camera. In the remote robot dexterous hand system, the mechanical part of the dexterous hand can be installed on any mechanical arm, and the electrical part is connected with the dexterous hand controller by a connection line, which is composed of three strands of 25-wire cables; The cable is connected with the upper control computer, and the connection is composed of four 25-wire cables; the cable of the camera CCD is directly connected to the USB interface of the virtual environm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com