Image border testing algorithm based on cellular automata
A cellular automata and image edge technology, which is applied in image analysis, image data processing, calculation, etc., can solve the problems of reducing edge detection accuracy, affecting processing results, and interfering with noise sensitivity, so as to overcome the defect of noise sensitivity and prolong Number of iterations, effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0041] Embodiment 1: Edge detection of nuclear magnetic resonance image
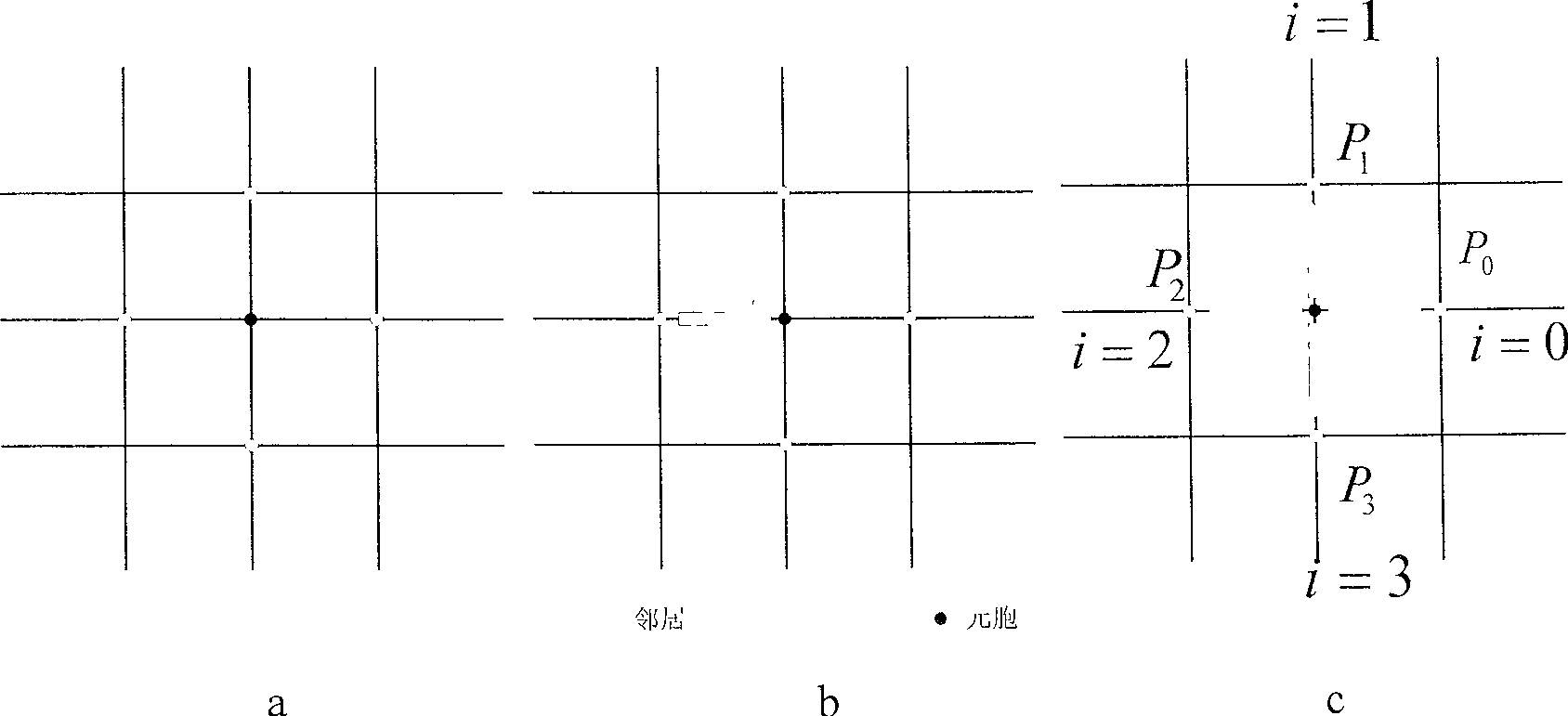
[0042] 1) Convert the image (such as image 3 Shown) Each pixel point is regarded as a cell; each cell and its four neighbors form a Moore neighborhood (such as figure 1 .a); The state set of each cell is defined as the number of particles that may be contained in the cell; the number of particles contained in each cell is greater than 0 and less than 256.
[0043] 2) Initialization, defining that the initial state of each cell is equal to the gray value of the corresponding pixel in the image.
[0044] 3) At time t, generate a random sequence u x,y (i)={1, 2, 3, 4, ...}, where u x,y (i) The probability of equaling 1, 2, 3, and 4 is 1 / 4.
[0045] 4) Calculate the number of particles moving to its four neighbors in the cell N i ( x , y ) = Σ j ...
Embodiment 2
[0065] Embodiment 2: edge detection of CT image
[0066] 1) Convert the image (such as Figure 5 Shown) Each pixel point is regarded as a cell; each cell and its four neighbors form a Moore neighborhood (such as figure 1 .a); The state set of each cell is defined as the number of particles that may be contained in the cell; the number of particles contained in each cell is greater than 0 and less than 256.
[0067] 2) Initialization, defining that the initial state of each cell is equal to the gray value of the corresponding pixel in the image.
[0068] 3) At time t, generate a random sequence u x,y (i)={1, 2, 3, 4, ...}, where u x,y (i) The probability of equaling 1, 2, 3, and 4 is 1 / 4.
[0069] 4) Calculate the number of particles moving to its four neighbors in the cell N i ( x , y ) = Σ j = ...
Embodiment 3
[0089] Embodiment 3: edge detection of digital image
[0090] 1) Convert the image (such as Figure 7 Shown) Each pixel point is regarded as a cell; each cell and its four neighbors form a Moore neighborhood (such as figure 1 .a); The state set of each cell is defined as the number of particles that may be contained in the cell; the number of particles contained in each cell is greater than 0 and less than 256.
[0091] 2) Initialization, defining that the initial state of each cell is equal to the gray value of the corresponding pixel in the image.
[0092] 3) At time t, generate a random sequence u x,y (i)={1, 2, 3, 4, ...}, where u x,y (i) The probability of equaling 1, 2, 3, and 4 is 1 / 4.
[0093] 4) Calculate the number of particles moving to its four neighbors in the cell N i ( x , y ) = Σ j = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com