Multifreedom stereo vision device having laser
A technology of stereo vision and degree of freedom, applied in the direction of manufacturing tools, manipulators, etc., can solve problems such as difficulty in accurate positioning, feature mismatch, and blurred target features, and achieve the effect of simple structure and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
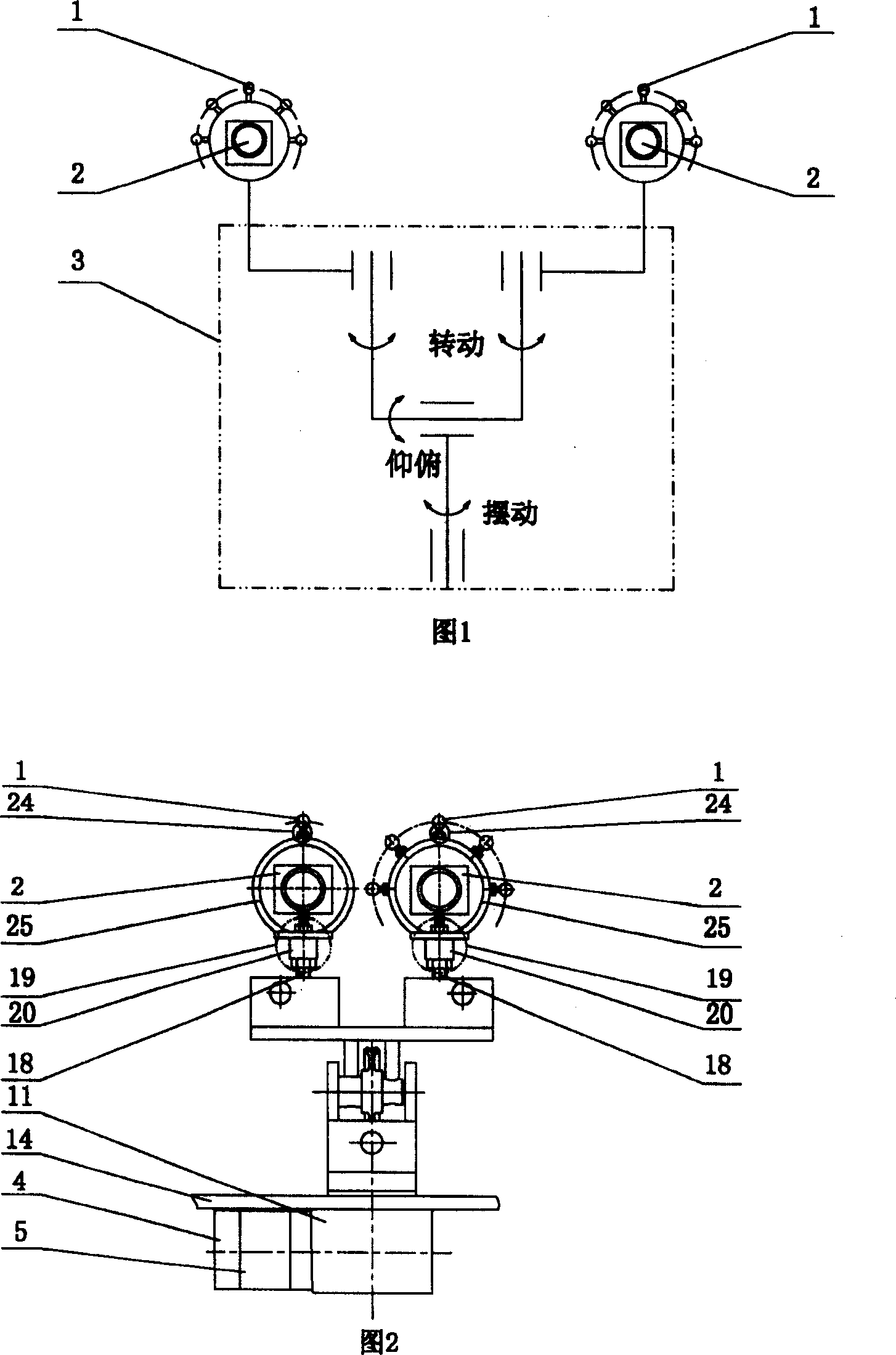
[0016] Shown in Figure 1 is the camera 2, there are two, also known as binocular, and there are multiple lasers 1, the laser 1 is a small laser; the camera 2 and the laser 1 are installed on the four-degree-of-freedom mechanical body 3, forming a plurality of lasers 1 The multi-degree-of-freedom stereo vision device can make the camera 2 and the laser 1 move in four degrees of freedom; the point line of the laser 1 is parallel to the optical axis of the camera 2 .
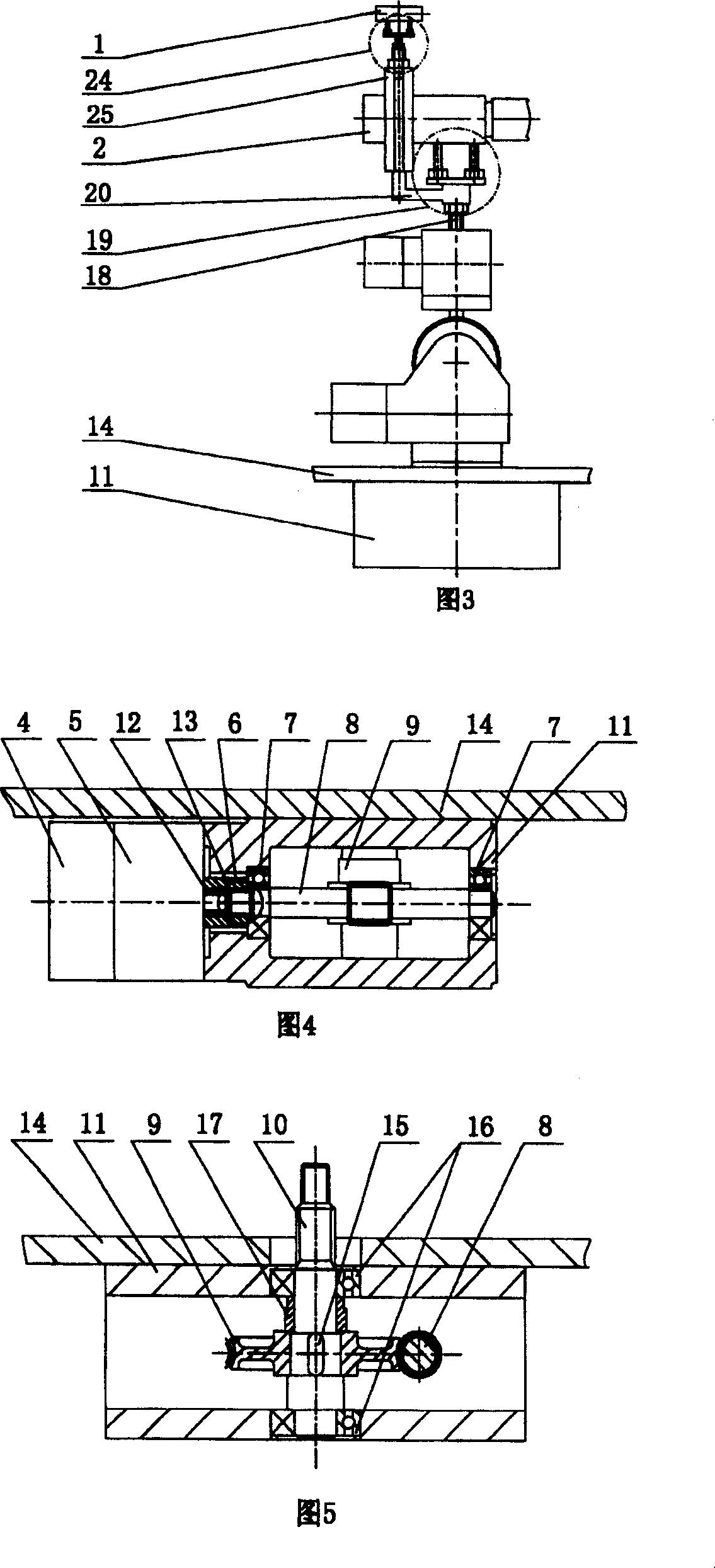
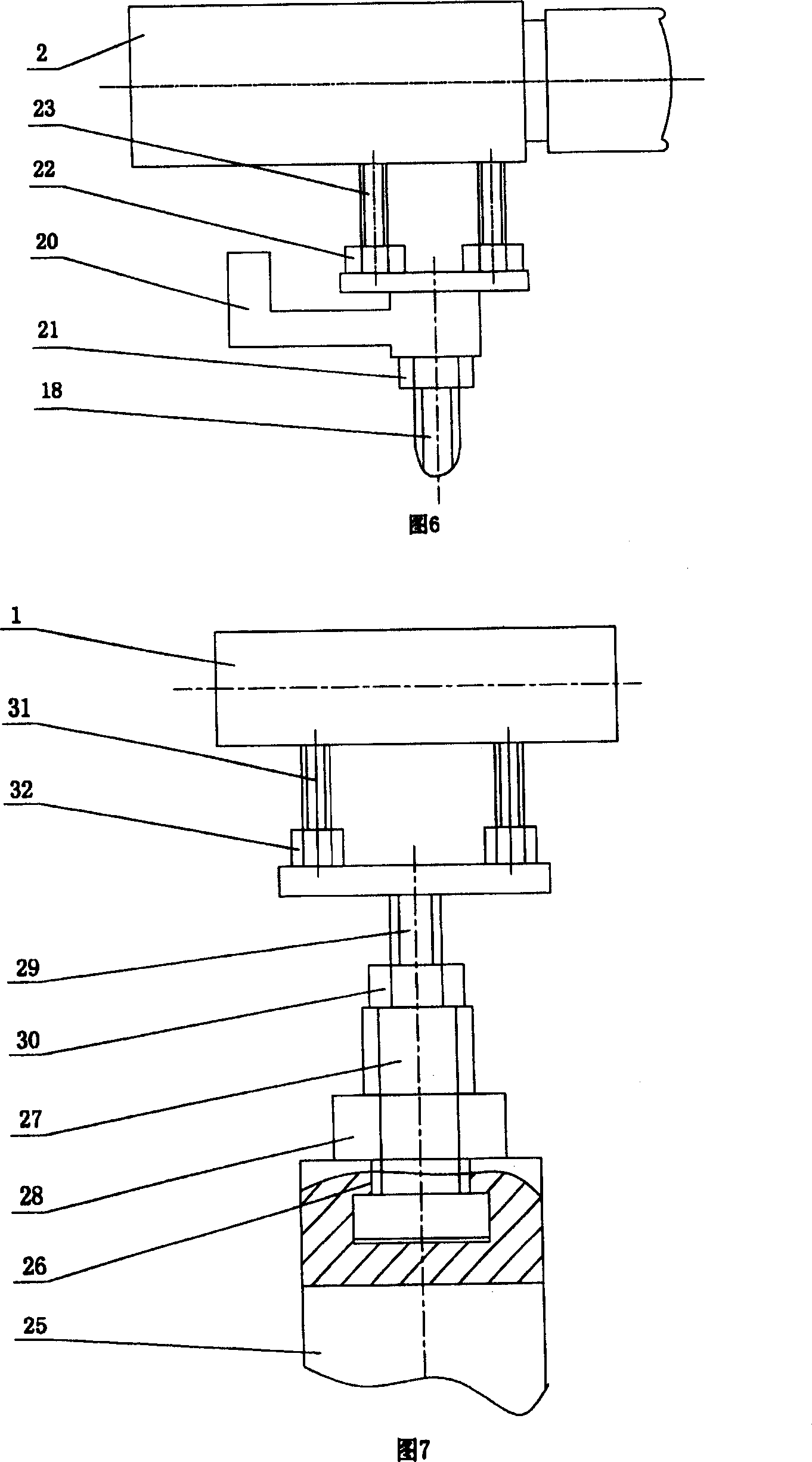
[0017] Since the four-degree-of-freedom motion realization structure of the multi-laser multi-degree-of-freedom stereoscopic vision device is the same, the specific implementation process of the multi-laser multi-degree-of-freedom stereoscopic vision device is described here by realizing the swinging freedom motion structure.
[0018] As shown in Figures 1, 2, 3, 4, 5, 6, and 7, one end of the motor 5 is connected to the encoder 4, and the motor 5 is connected through the spline wheel 12, the spline sleeve 6, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com