Hyperdexterous surgical system
a surgical system and hyperdexter technology, applied in the field of surgical systems and methods, can solve the problems of robotic tools, not being well-suited for other surgical tasks, and the motion of the distal end of the tool relative to the proximal end of the tool may not be natural,
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
an embodiment
of a Surgical Method
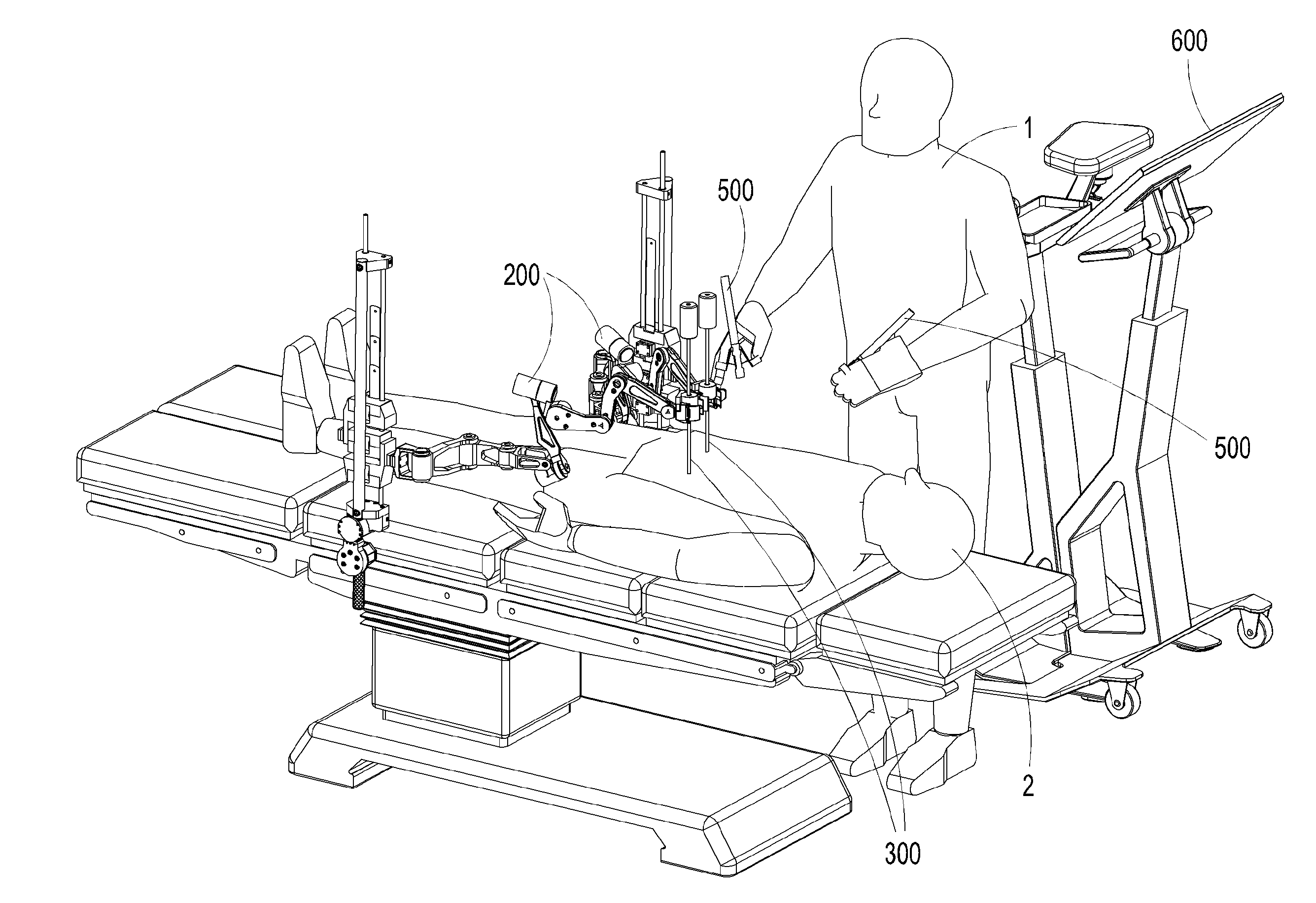
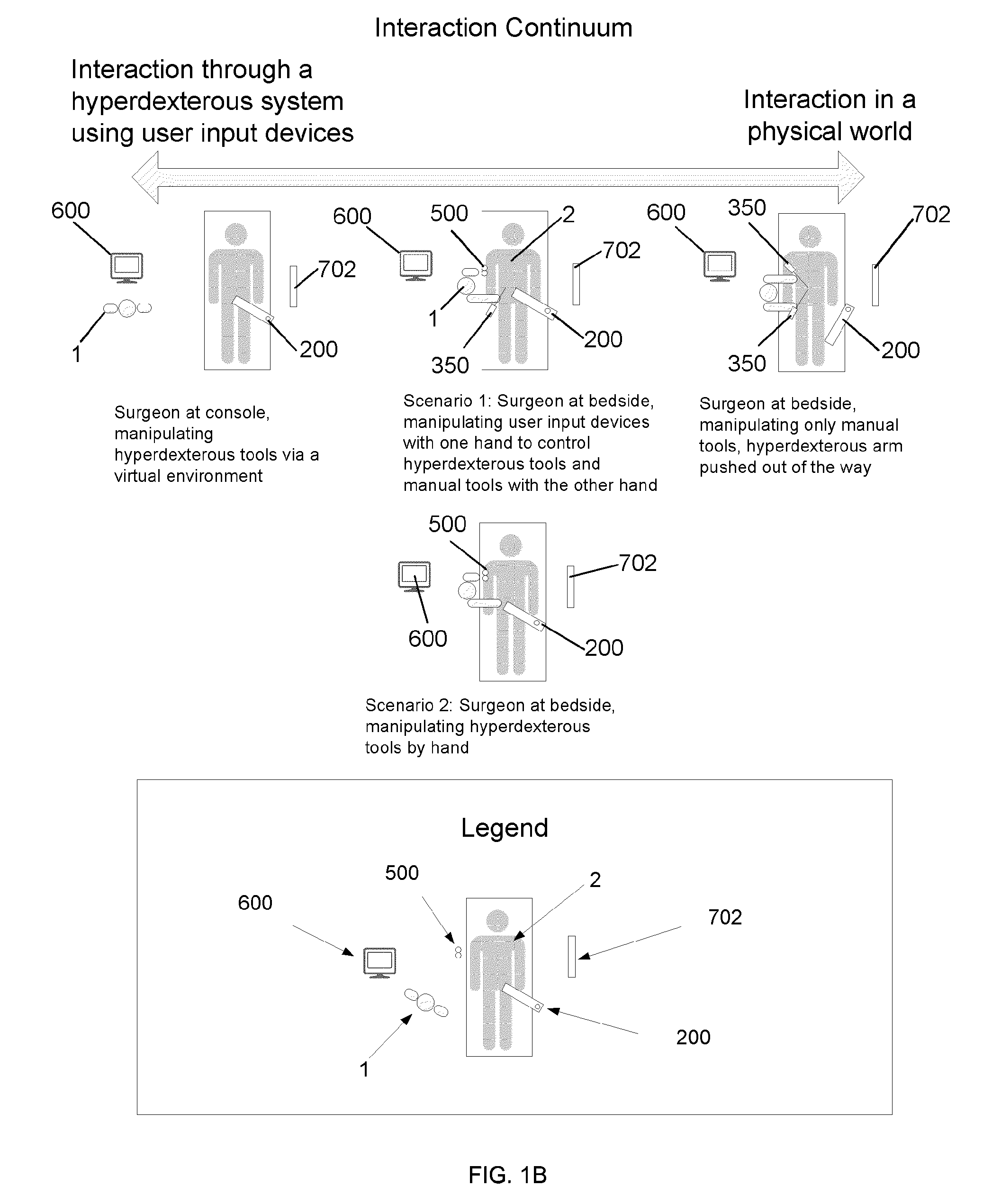
[0343]In some embodiments, one or more manual tools 350 are used in conjunction with one or more hyperdexterous surgical tools 300 in the same work space. An example of a manual tool 350 is a stapler 354, see FIG. 39. The stapler 354 may be used in conjunction with the hyperdexterous surgical tool 300. The workflow when using both types of tools in a colon resection surgical procedure is shown in FIG. 39, which shows a method 5. FIG. 39 illustrates one method of using a hyperdexterous surgical tool 300 and a manual tool 350. The method relates to holding the colon in a particular position and placing a staple line across the colon. The system includes a first grasper 312, a second grasper 314, a camera 304, and a stapler 354. The system includes two input devices 500, a first controller 516 and a second controller 518.
[0344]In step 10, the operator 1 may position the camera 304 by using any of the input devices 500. In some embodiments, the operator 1 connects an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com