Collaborative engagement for target identification and tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029]Reference will now be made in detail to exemplary embodiments of the present teachings, examples of which are illustrated in the accompanying drawings. Wherever possible, the same reference numbers will be used throughout the drawings to refer to the same or like parts.
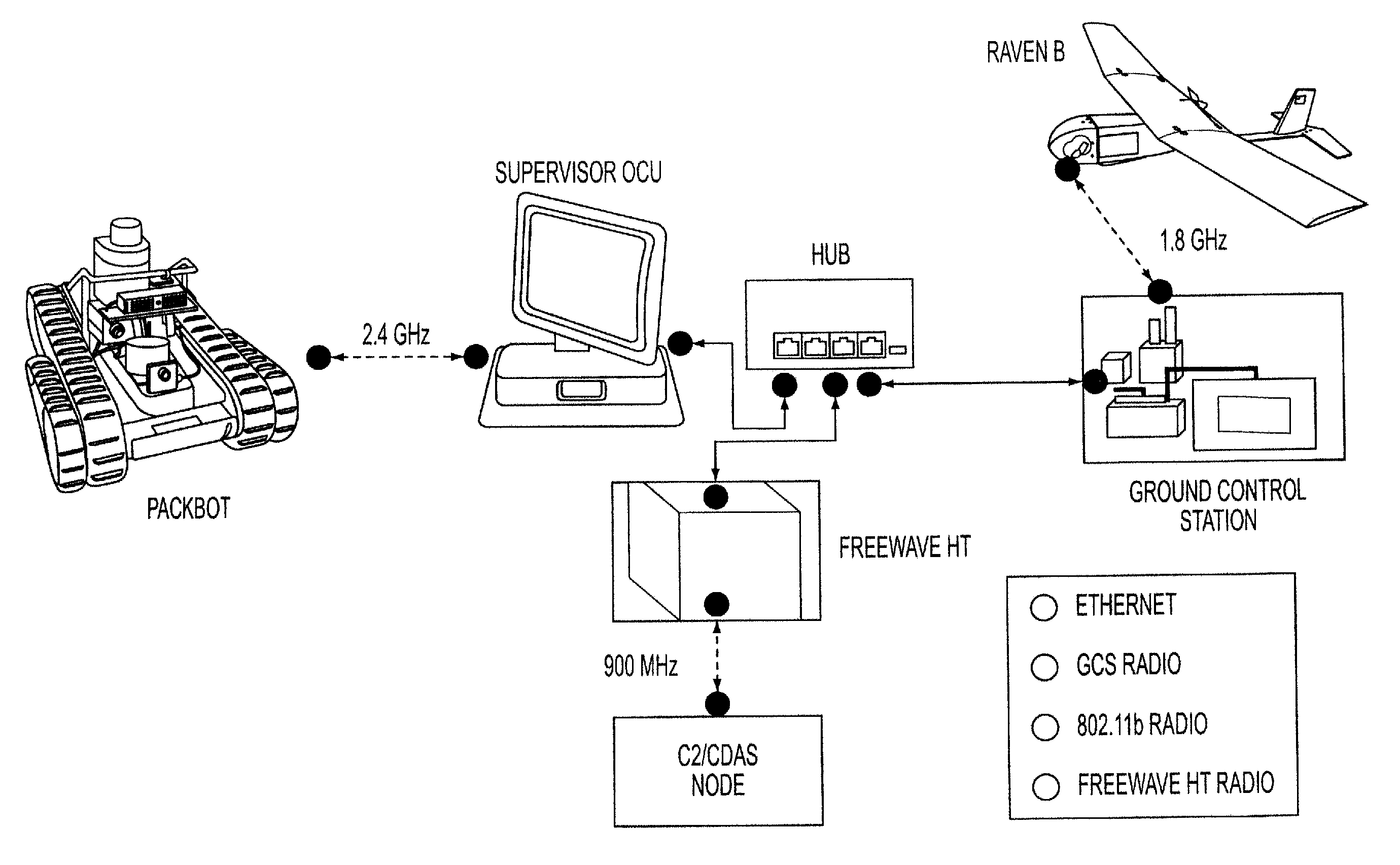
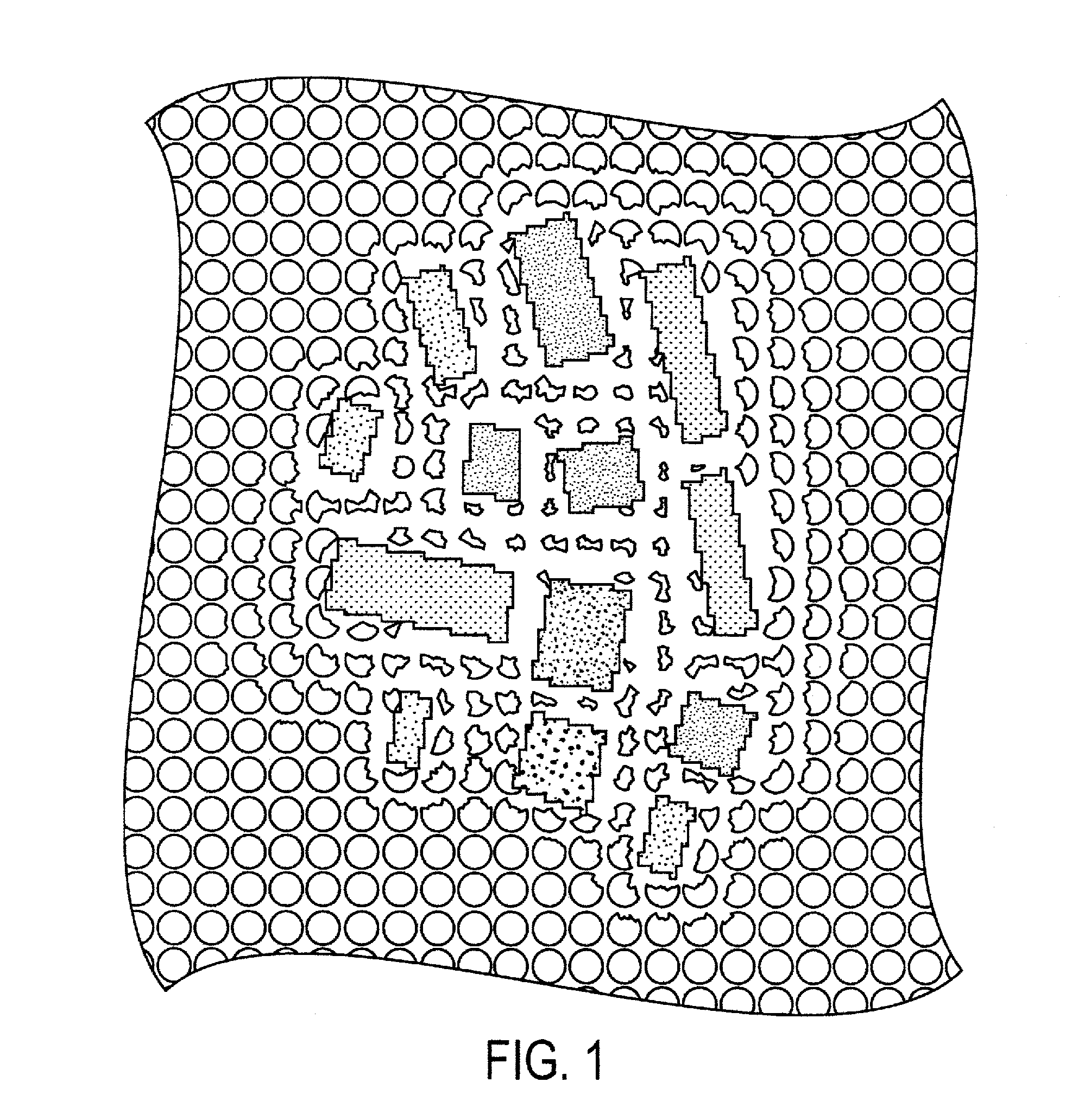
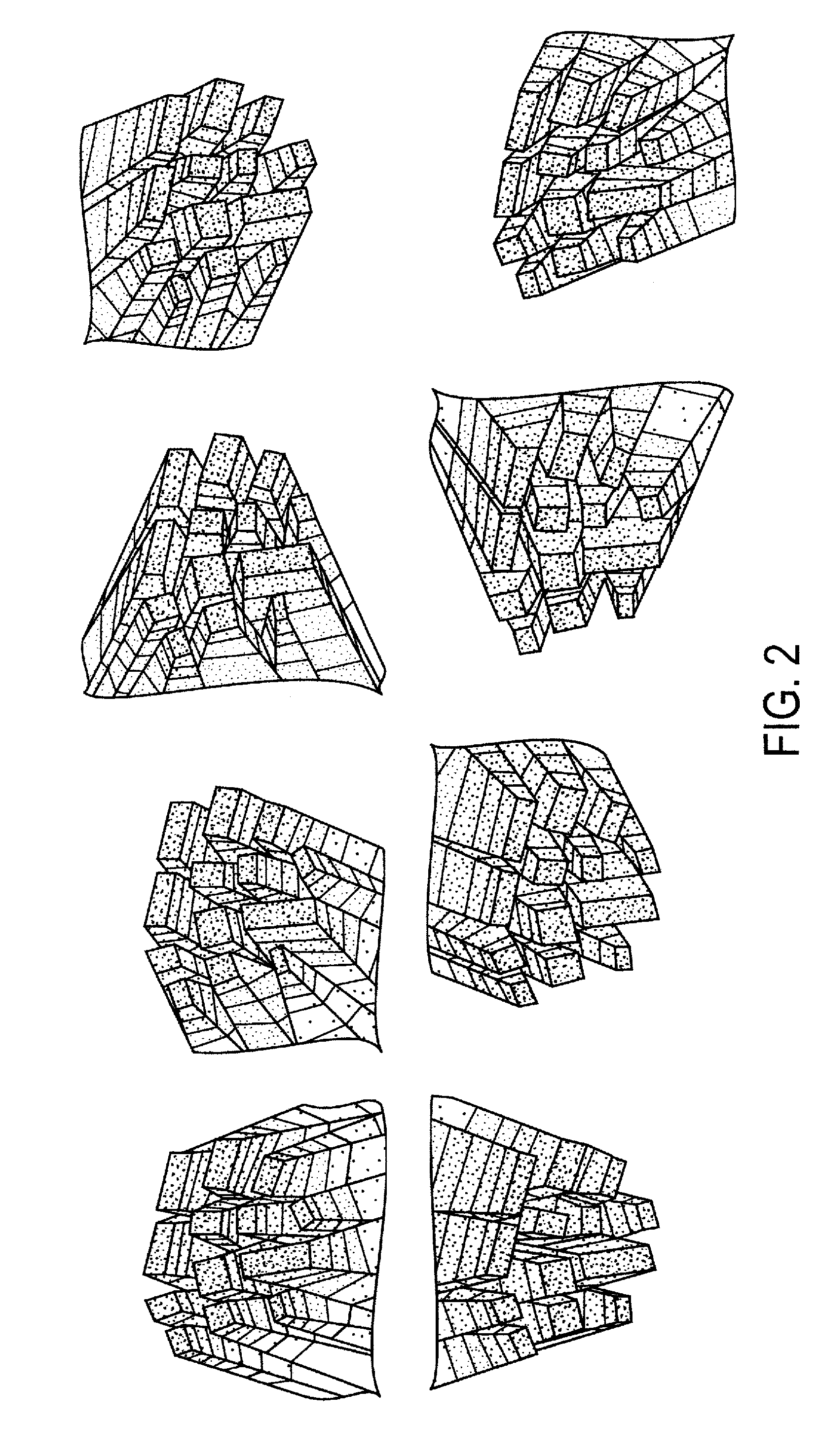
[0030]In accordance with the present teachings, more than one unmanned vehicle (including one or more UAVs and / or UGVs) is utilized, collaboratively, to search for, detect, track, and identify a target. The unmanned vehicles collaborate to best ensure that at least one unmanned covers the target while the sights of the other vehicle(s) are blocked by, for example, and urban obstruction such as a building. The present teachings contemplate giving unmanned vehicles the intelligence to decide which positions will maximize potential sight lines, to predict (in certain embodiments of the present teachings with operator assistance and guidance) where a target will go, and to allow teams of vehicles to collaborate in a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com