Horizontal multiple articulation type robot
a multi-joint, robot technology, applied in the direction of mechanical control devices, process and machine control, instruments, etc., can solve the problems of long path between two points, difficult to determine the layout of the position effective arrangement (in the shortest distance) of the robot, and reduce the cost. , the effect of wiring problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
embodiment 1
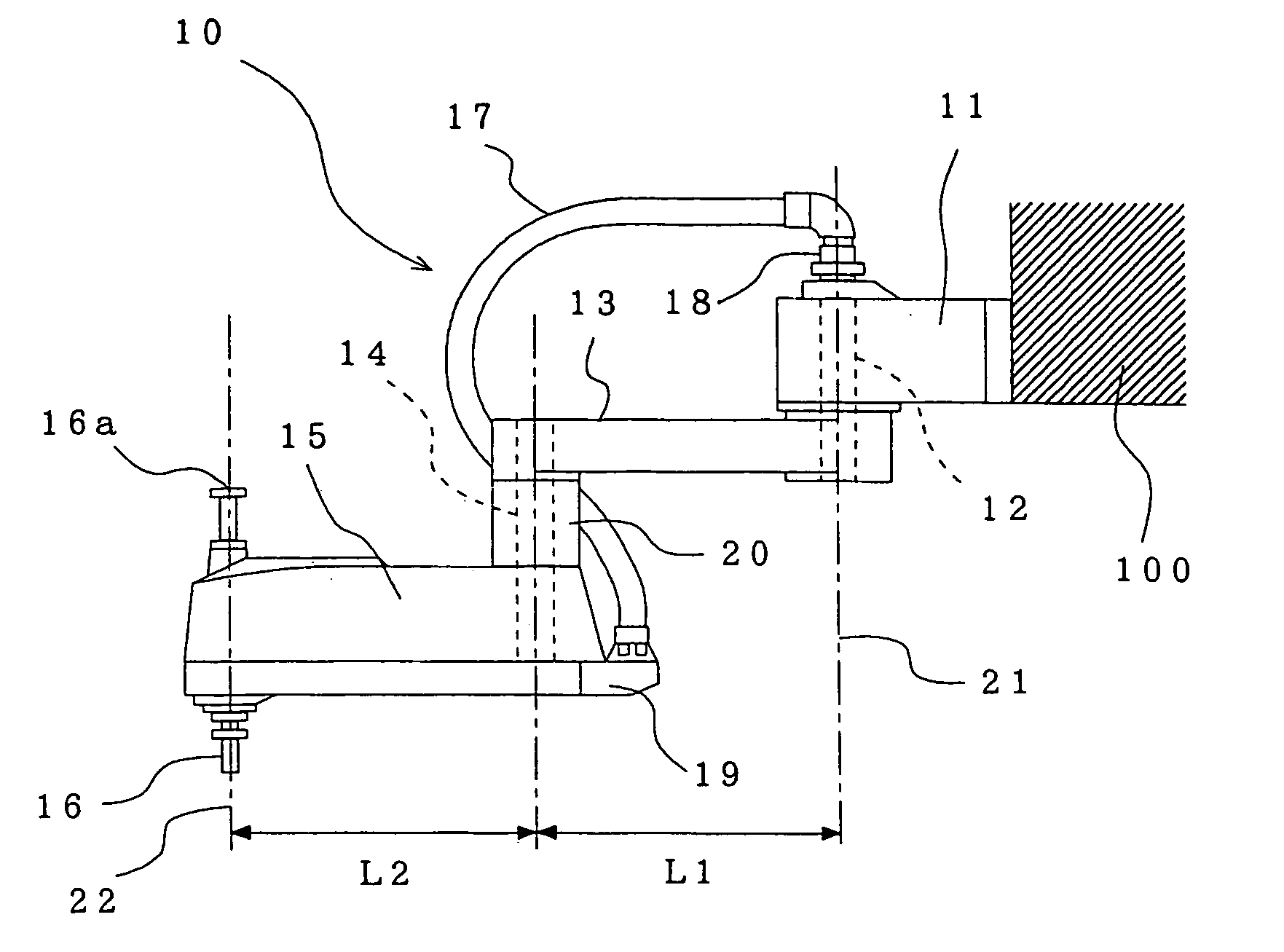
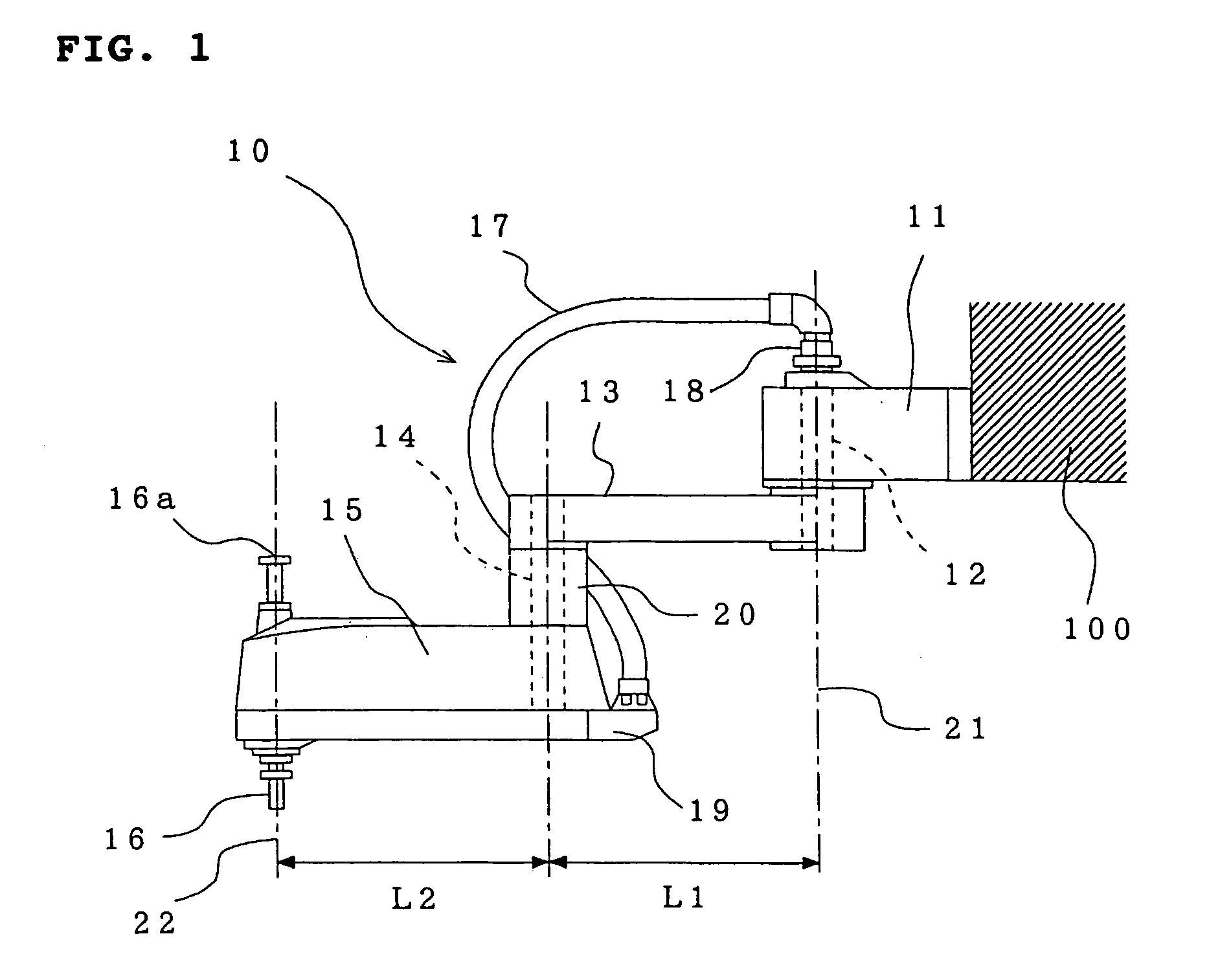
[0032]FIG. 1 is a side view of the horizontal multijoint type robot according to the embodiment 1, and FIG. 2 is a side view illustrating one operating mode of the horizontal multijoint type robot.
[0033] The horizontal multijoint type robot 10 comprises a base 11, a first arm 13 connected through a first joint shaft 12 to the base 11, a second arm 15 connected through a second joint shaft 14 to the first arm 13 and a working shaft 16 provided rotatably and movably up and down on the distal end of the second arm 15. Mounted onto the working shaft 16 is a handling device or other tool (not shown) for assembling, transferring, inspection or the like in accordance with a working purpose. Moreover, the arm length L1 of the first arm 13 (a distance between the center of the first joint shaft 12 and the center of the second joint shaft 14) and the arm length L2 of the second arm 15 (a distance between the center of the second joint shaft 14 and the center of the working shaft 16) are equa...
embodiment 2
[0045] Although the embodiment described above uses the two arms and the lengths L1 of the first arm 13 and the length L2 of the second arm 15 are equal to each other, the present embodiment 2 using three arms will be explained with reference to FIGS. 5 and 6. In the case of the horizontal multijoint type robot, maximum of three arms may be sufficient in practical use.
[0046]FIG. 5 is a schematic side view of a horizontal multijoint type robot according to this embodiment, and FIG. 6 is a view illustrating an operating area of the robot of this embodiment.
[0047] As can be seen from the explanation of the operating area of the robot in FIG. 3 described above in the case that the length L1 of the first arm 13 and the length L2 of the second arm 15 are different from each other, the operation impossible area having a radius which is difference between L1 and L2 will occur about the center of the first joint shaft 12. In other words, when the length of the second arm 15 is shorter or l...
embodiment 3
[0052]FIG. 7 is a partly sectional side view of a horizontal multijoint type robot according to the embodiment 3.
[0053] In this mode, there is disclosed one example of a driving mechanism for each joint shaft 12 and 14 in the case using two arms. The case using three arms is similar to the case of two arms.
[0054] In this embodiment, both the first joint shaft 12 and the second joint shaft 14 are made from hollow shafts through which wirings 36 extend. Also, the first arm 13 and the second arm 15 have a hollow portion 37 and 38 for extending wirings therethrough.
[0055] The first joint shaft 12 and the second joint shaft 14 made of the hollow shafts are rotationally driven by a first motor 43 and a second motor 44 through a first reduction machine 41 and a second reduction machine 42 respectively formed of a harmonic drive mechanism. Also, reference numeral 45 denotes a first timing belt mechanism provided between the first motor 43 and the reduction machine 41, and numeral 46 a se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com