Process for controlling industrial robots, and related robots, robot systems and computer programs
A technology of industrial robots and control systems, applied in general control systems, control/regulation systems, program-controlled manipulators, etc., to solve problems such as confusion, bad work, damage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
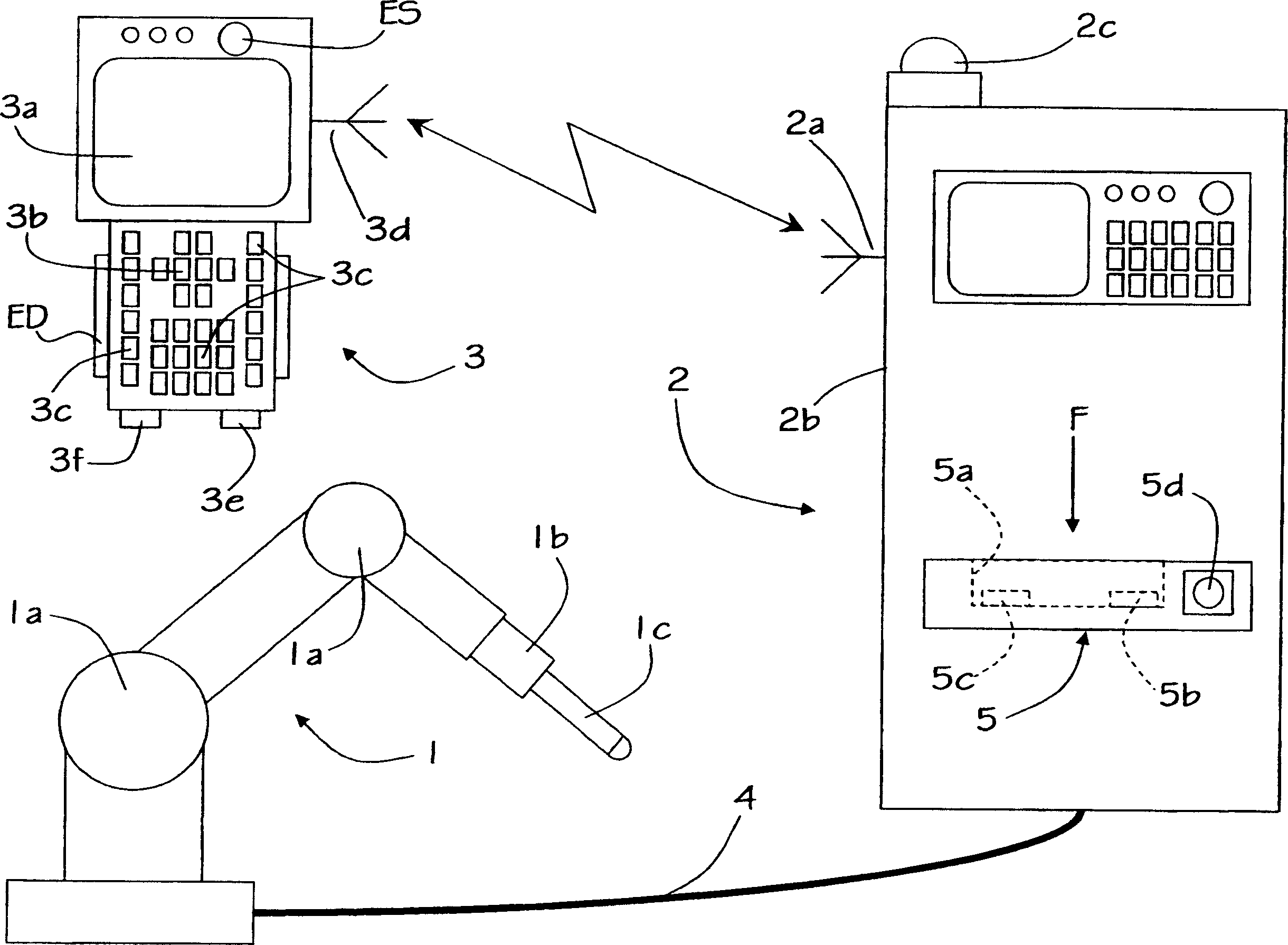
[0019] figure 1 An industrial robot comprising a manipulator 1 , a control unit 2 and a portable programming terminal or teaching operating ring 3 is shown. The manipulator 1 has a plurality of parts that move according to respective axes, articulated by means of a joint 1a and an end wrist 1b with a universal tool 1c. The manipulator 1 is connected to its control part 2 by means of a cable 4 . Terminal 3 includes at least
[0020] - Display 3a, with which the machine status, programming steps, possible warnings and various parameters can be monitored, such as the position of the axes of the manipulator; the display is used both when programming the positions of the axes and the steps of the motion program, as well as when monitoring the part 2 remotely 3a;
[0021] - a set of keys for controlling the movement of the axes of the manipulator 1, some of these keys are denoted 3b; said set of keys comprises in particular keys for selecting the desired kinematic reference syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com