Self-reconstitution robot by full gear transmission driving six rotative surfaces of module
A technology of gear transmission mechanism and rotating surface, which is applied in the direction of gear transmission, transmission, belt/chain/gear, etc. It can solve the problems of difficult to guarantee the accuracy of shaft hole equipment, unguaranteed connection, high cost, etc., and achieve a compact internal structure , convenient and fast docking, and the effect of fewer parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
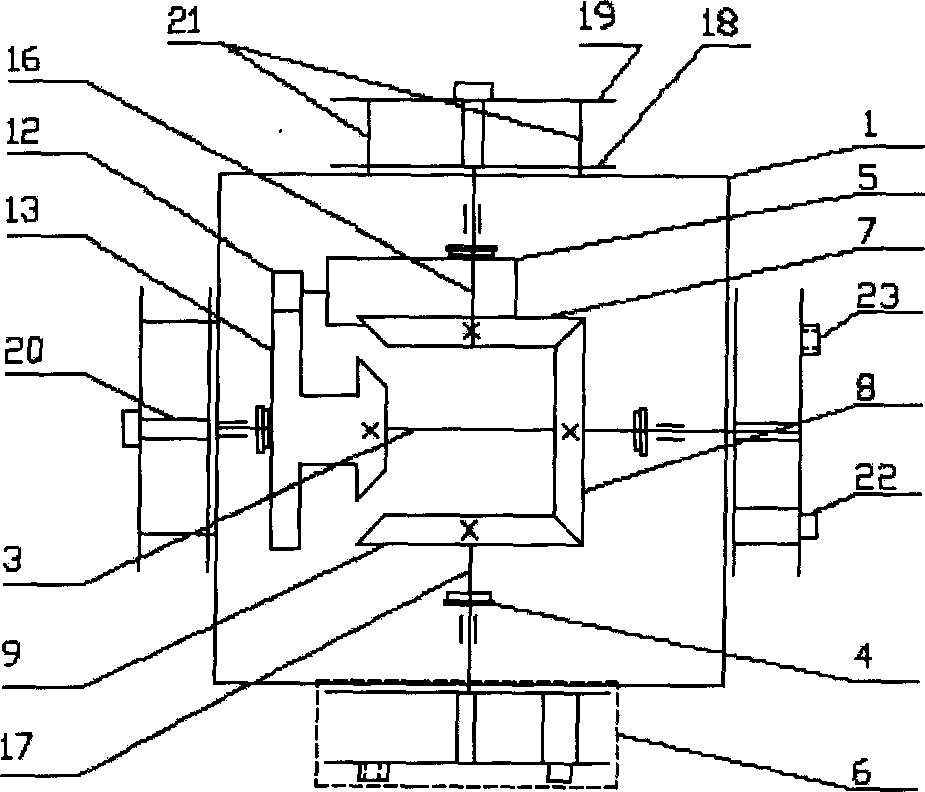
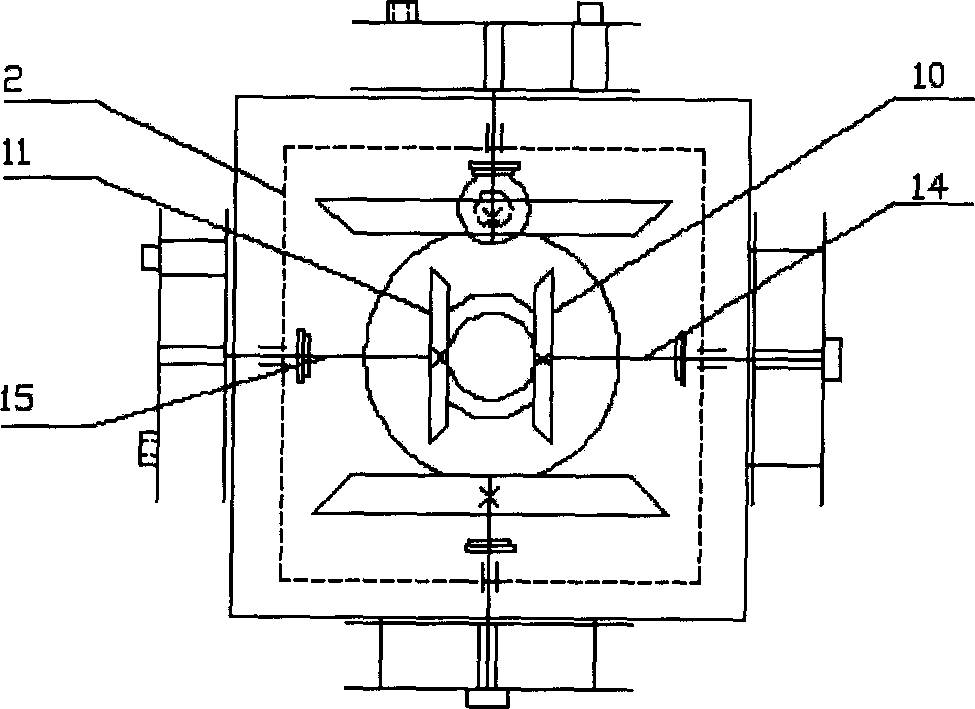
[0013] Such as figure 1 , figure 2 , image 3 As shown, the present invention includes: a box body 1, a gear set 2, a transmission shaft 3, a clutch device 4, a motor 5, and a connecting surface device 6. The connection method is: the flange of the motor 5 is fixed on the box body 1, a clutch device 4 is provided at both ends of the transmission shaft 3, and the first, second, third and fourth output shafts 14, 15, 16, 17 are also A clutch device 4 is respectively provided, and the two ends of the transmission shaft 3 and the output ends of the first, second, third and fourth output shafts 14, 15, 16, 17 are connected to the six connection surface devices 6 through the clutch device 4 .
[0014] The gear set 2 includes: the first large bevel gear 7, the second large bevel gear 8, the third large bevel gear 9, the first small bevel gear 10, the second small bevel gear 11, the pinion gear 12, conjoined gears 13, and first, second, third and fourth output shafts 14, 15, 16, 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com