Robot knuckle actuating range limitation device for equipping movement area checking device
A technology for detection devices and action areas, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as increased working hours, unfavorable prices, and large parts, and achieves improved maintainability, reduced set-up man-hours, and increased set-up density. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
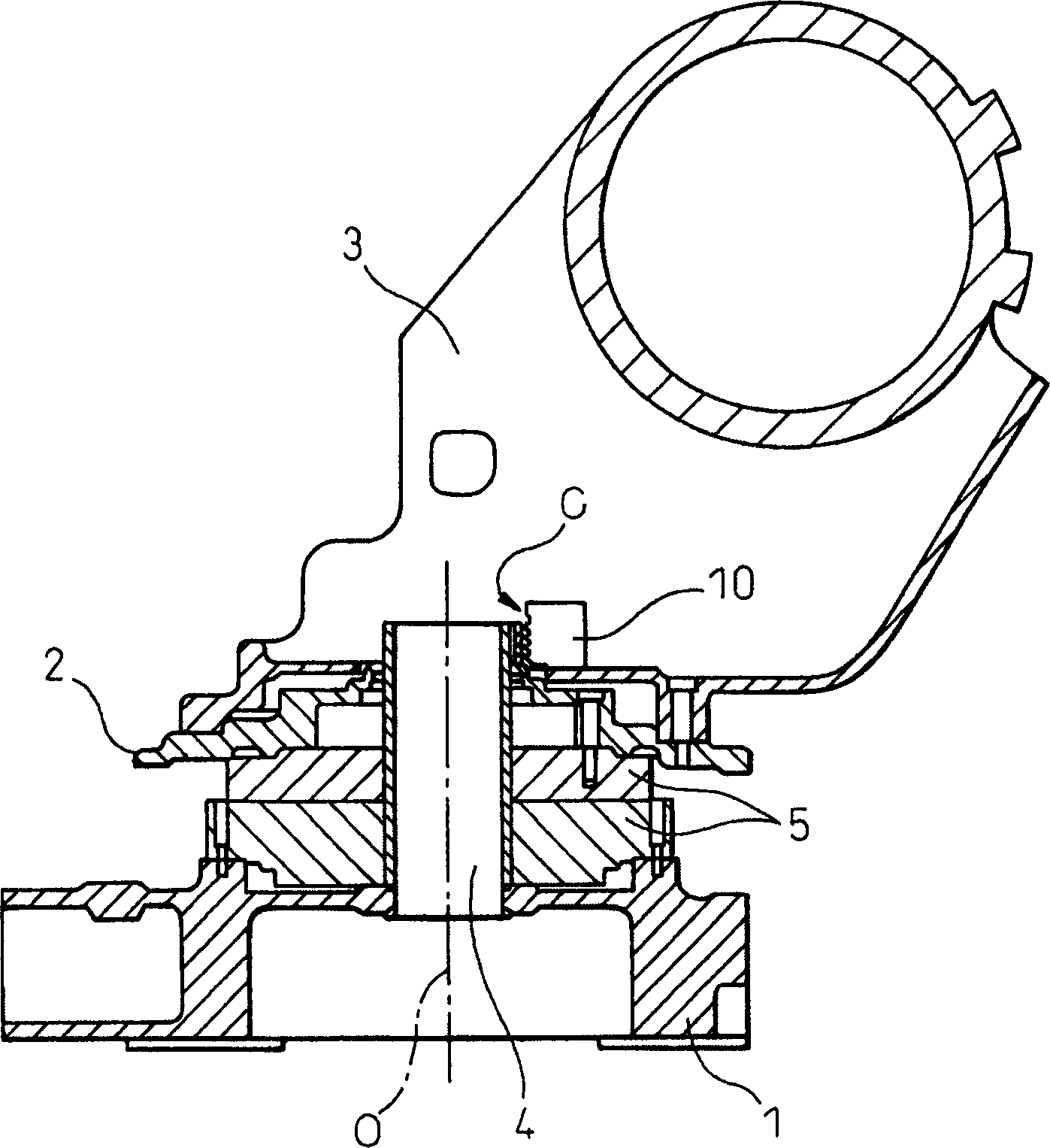
[0023] Below, refer to Figure 3 ~ Figure 6 Embodiments of the present invention will be described.
[0024] first, image 3 It is a cross-sectional view showing a joint portion of a robot equipped with a motion range detection and restriction device according to an embodiment of the present invention. image 3 Among them, symbol 1 is the first component corresponding to the J1 base (first connector base), which is fixed on the frame of the reducer 5 . In addition, reference numeral 2 is a second member (table member) fixed to the output shaft of the speed reducer 5, and is connected and fixed to a third member 3 corresponding to the J2 base (second connector base). On the other hand, the input shaft of the speed reducer 5 is coupled to an unillustrated motor (for driving the J1 axis).
[0025] Here, the speed reducer 5 constitutes a joint together with the second member 2 and has a known structure in which a hollow portion extends along the rotation axis O. As shown in FIG...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com