Self-calibrating projection equation method for implementing stereo PIV method
A self-calibration and projection technique used in the field of projection equations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
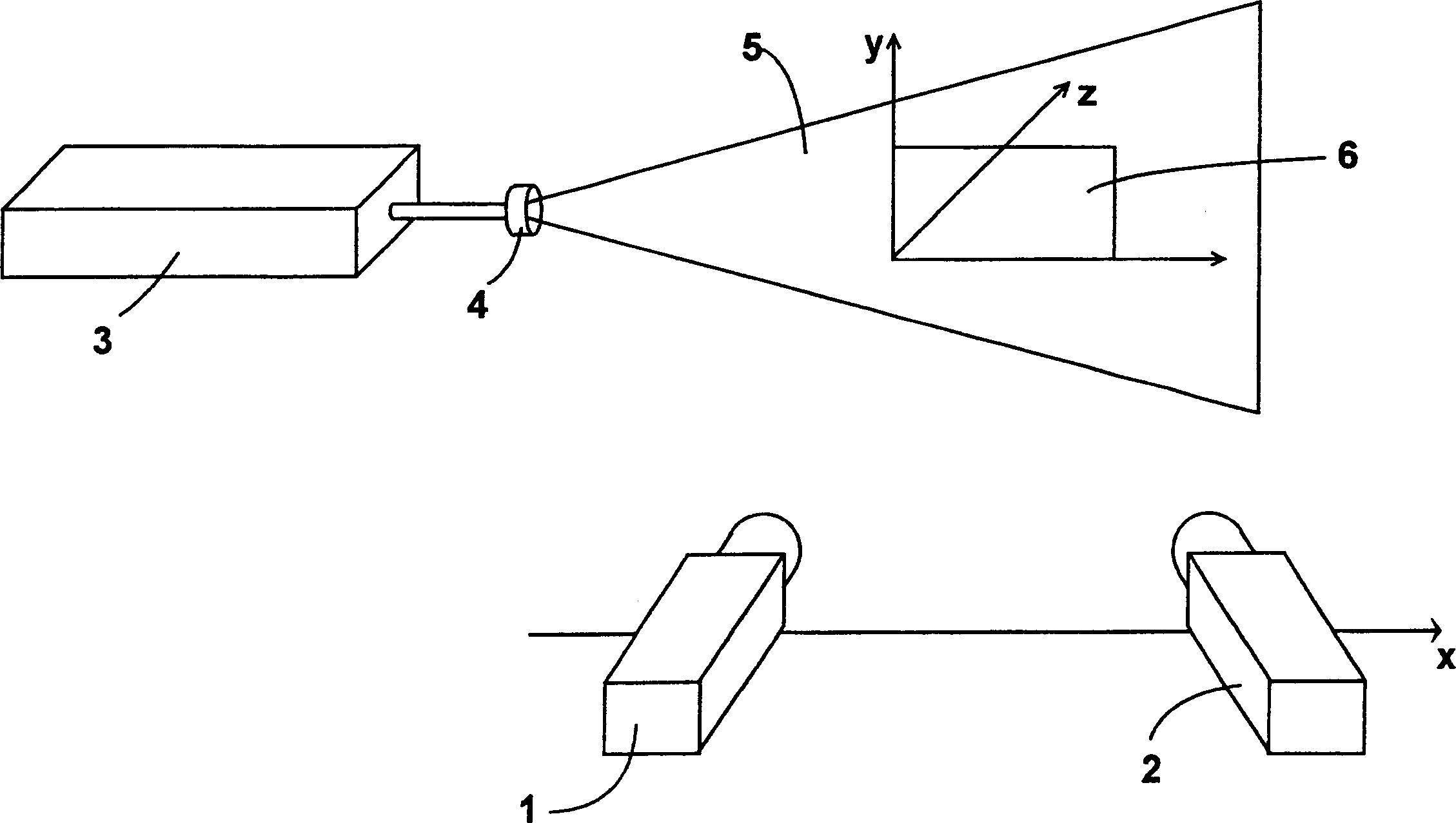
[0024] Take an ordinary camera with two cameras ( figure 1 and 2 ) based on a stereoscopic PIV-structure in which the camera can be positioned along the x-axis and aimed at the light section plane from both sides at an angle of typically 30-50°, wherein the light section plane is defined by the x-y plane with z=0. The two cameras are thus located at z=-Zcam. The principal optical axes of the cameras are coplanar and lie in a common x-y plane. Two pulsed lasers 3 generate light sections 5 at the same position with the aid of a light section optics 4 successively at short intervals, wherein two cameras record two images 6 successively at short intervals, in each image there is a laser pulse.
[0025]In this example it is assumed that a volume calibration has already been carried out independently of the actual light cross-section by, for example, simultaneous recording of a 3D calibration plate by two cameras. All internal and external image parameters relative to a coordina...
example 2
[0030] The prerequisite is the same test structure as Example 1. It is also assumed that the camera objective is angled relative to the camera plane such that the intersection / Scheimflug condition is satisfied such that all particles in the plane of the light section are in focus. Of course no pre-calibration is provided in this example, but the projection equation should be determined by the point correspondence itself. This is achieved by means of a direct approximation, in which way the missing projection parameters are determined (gefittet). Because there are many free parameters, certain assumptions must be made in order to converge to a solution. For this there are different possibilities to reduce the number of free parameters with the help of known situations:
[0031] It is assumed that, from a pre-calibration of the Scheimflug adapter performed once, it is known how the principal point (Hauptpunkt) moves as a function of the angle, or how the Scheimflug conditions ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com