Robot universal open control system facing object
An object-oriented and robotic technology, applied in the fields of robot and computer interface, computer engineering, and robotics, can solve problems such as wasting research energy, affecting the research and development of robotics, and lack of generality of the architecture, achieving high practical value and practical significance. Robust programming model, the effect of improving development efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
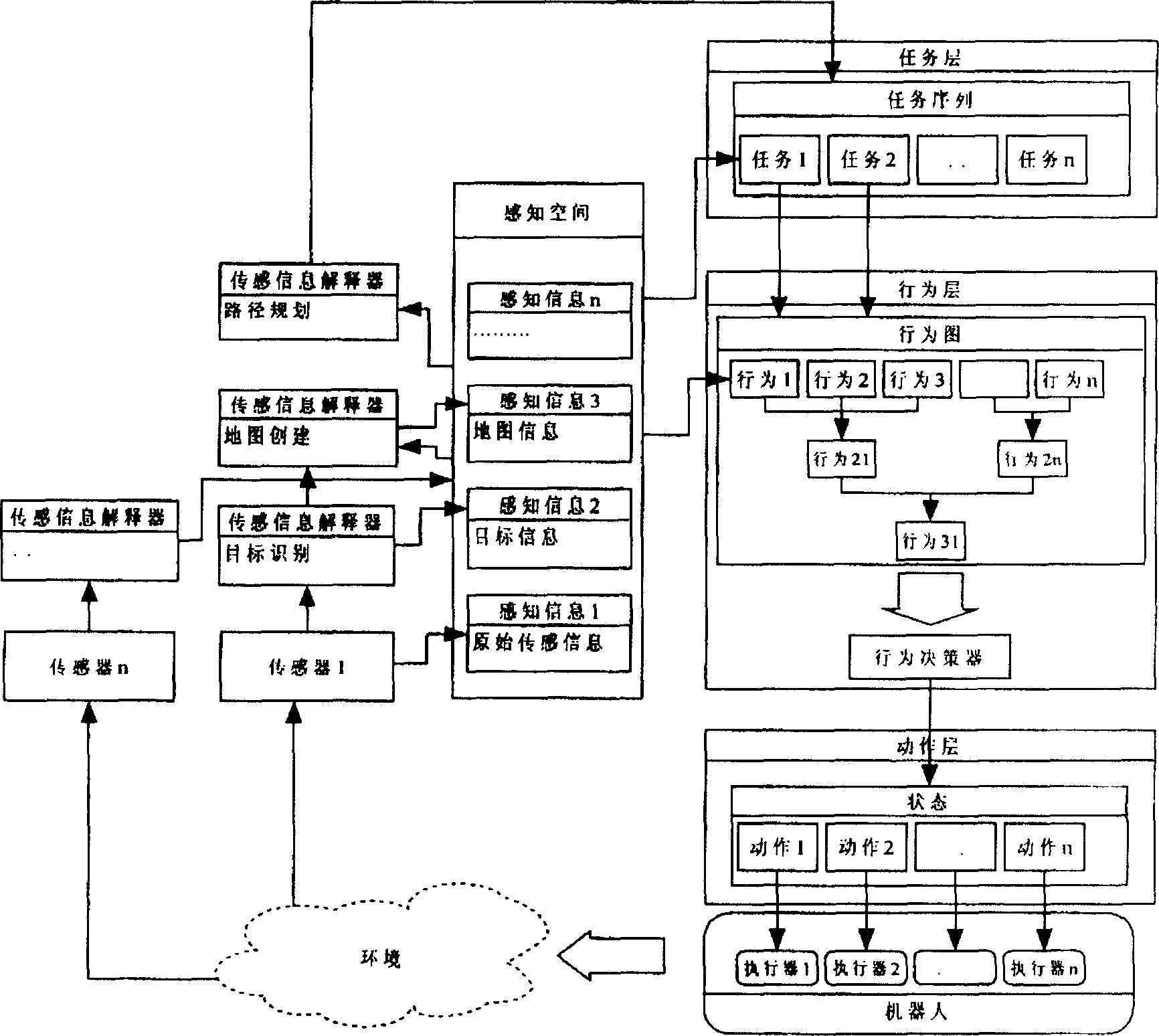
[0026] The general robot control system of the present invention consists of figure 1As shown, it includes three control layers of action, behavior and task, perception space module, sensor module and sensory information interpreter. The action layer is the lowest layer of robot control, which is composed of state and action. The action accepts the set value given by the state and drives the corresponding robot actuator. Behavior layer is the middle layer of robot control, which is composed of behavior, behavior map and behavior decision maker. Behavior reads perceptual information in perceptual space and makes decisions about desired states. Several behaviors are combined in a certain way into a behavior graph. The behavior decision maker reads the expected state of all behaviors according to the combination relationship d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com