Path planning method for unmanned surface vehicle
A path planning, unmanned boat technology, applied in two-dimensional position/channel control and other directions, can solve the global planning method without dynamic obstacle avoidance ability, unable to guarantee the continuous change of the curvature of the planned path, and unfavorable control of the motion variables at the turning point and other problems, to achieve the effect of improving the search ability, optimizing the optimization ability, and weakening the local optimal problem.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
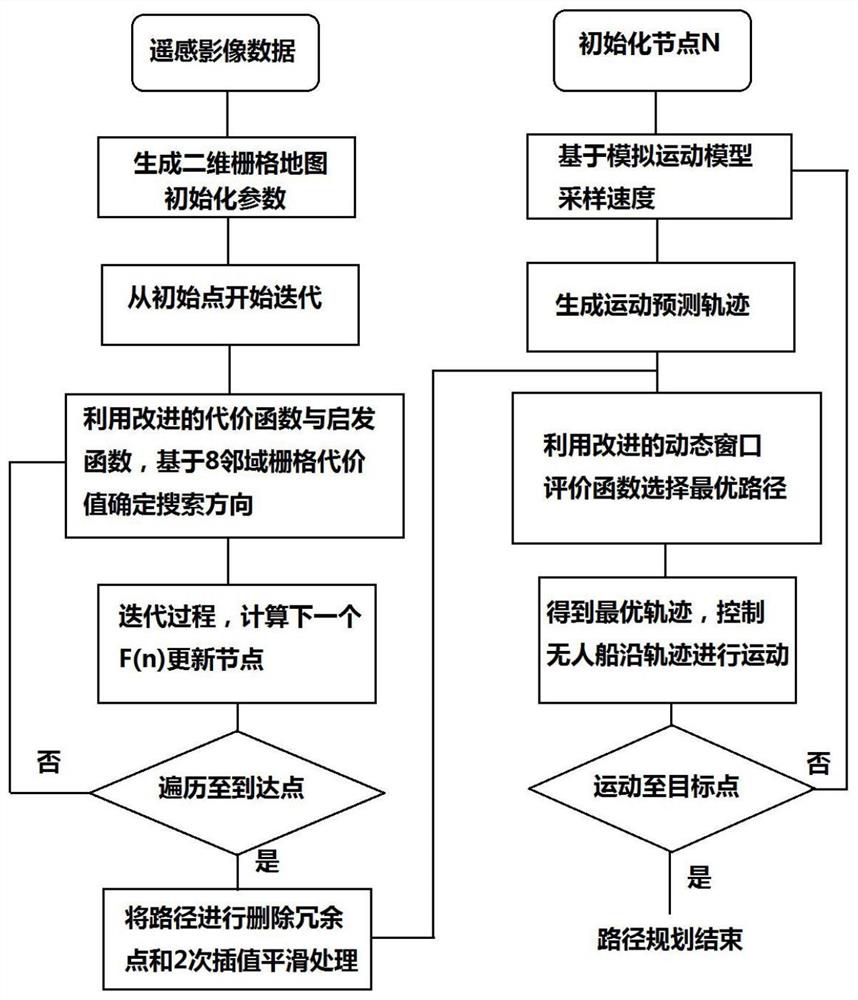
[0048] In conjunction with the accompanying drawings, the steps of the present invention are as follows:
[0049] Step 1: Obtain the global remote sensing image of the water surface environment through the aerial photographic image of the aircraft, so as to classify and binarize the aerial photographic image, and convert the image into a two-dimensional grid map.
[0050] The specific steps are as follows: firstly obtain the aerial image, and perform image cutting and binarization processing on it; classify the processed binary image, and cut the binary image into grids of equal size at equal intervals, according to each grid. The proportion of black and white blocks in the grid takes the binary color block (ie 0, 1) to obtain a two-dimensional grid matrix D n×n , set the environmental obstacle part as a black grid, set the water surfa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com