Planning method for dismounting sequence of robot with uncertain interference
A robotic, uncertain technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
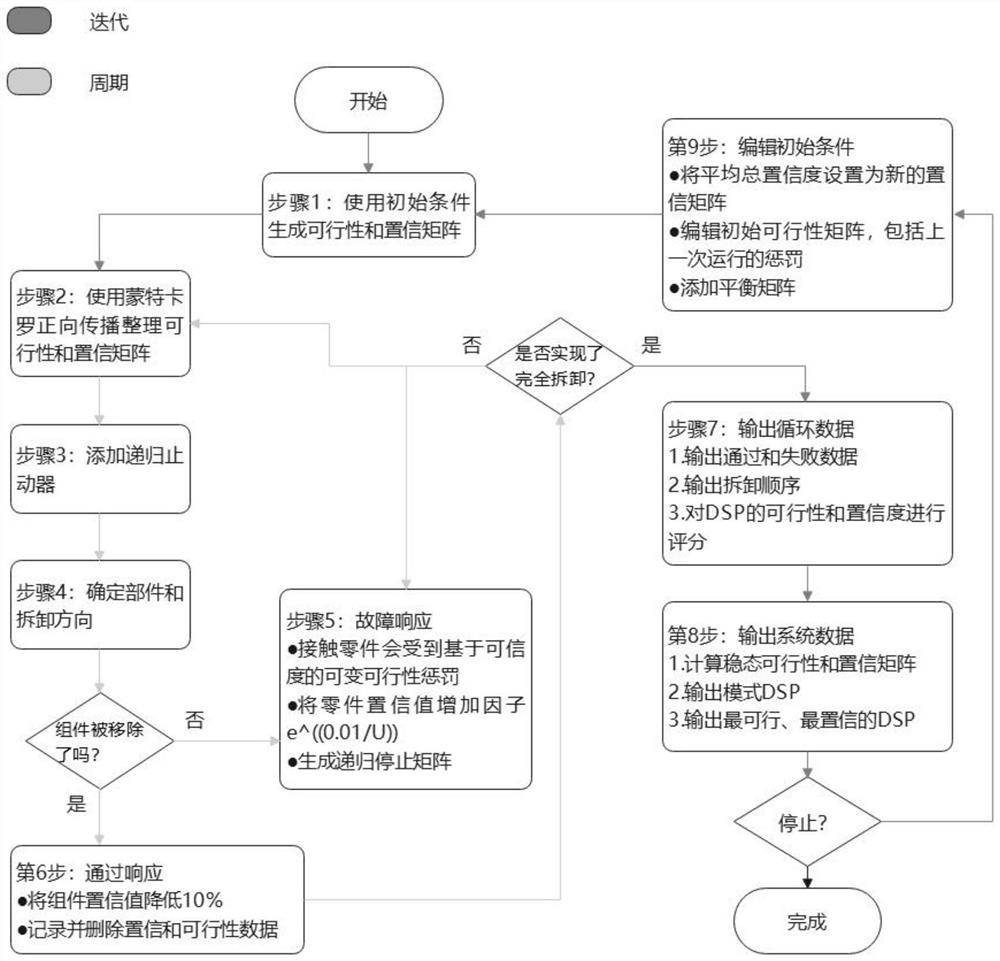
[0036] Example: see figure 1 , the present invention provides a technical solution: a method for planning the disassembly sequence of a robot with uncertain interference, firstly determining the mathematical representation of physical components in 2D space, analyzing the dynamic re-planning process of the algorithm, and solving the iterative estimation and sequence sorting scheme , a 3D case study to evaluate the algorithm; then through the fuzzy dynamic uncertainty matrix, combined with a re-planning strategy, the optimal disassembly sequence is defined according to the events that have occurred for planning;
[0037] The specific method steps are as follows:
[0038] Step 1: Generate compression feasibility, confidence and relationship matrices using initial conditions;
[0039] Step 2: Use Monte Carlo Forward Propagation to tidy the feasibility and confidence matrices, the normal distribution mean of the confidence and twice the standard deviation for summation and compre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com