Multi-mode hand rehabilitation system and method based on monocular vision guidance
A monocular vision, multi-modal technology, applied in the field of rehabilitation training robots, can solve the problems of increasing operation burden and system cost, not considering the reconstruction of motor nerve pathways, and unable to achieve bilateral coordinated movement, so as to enhance subjective initiative and promote hand movement. recovery of motor function, reconstruction of neural pathways, and increased effects of bilateral collaborative training mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The specific embodiments of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are intended to illustrate the present invention, but not to limit the scope of the present invention.
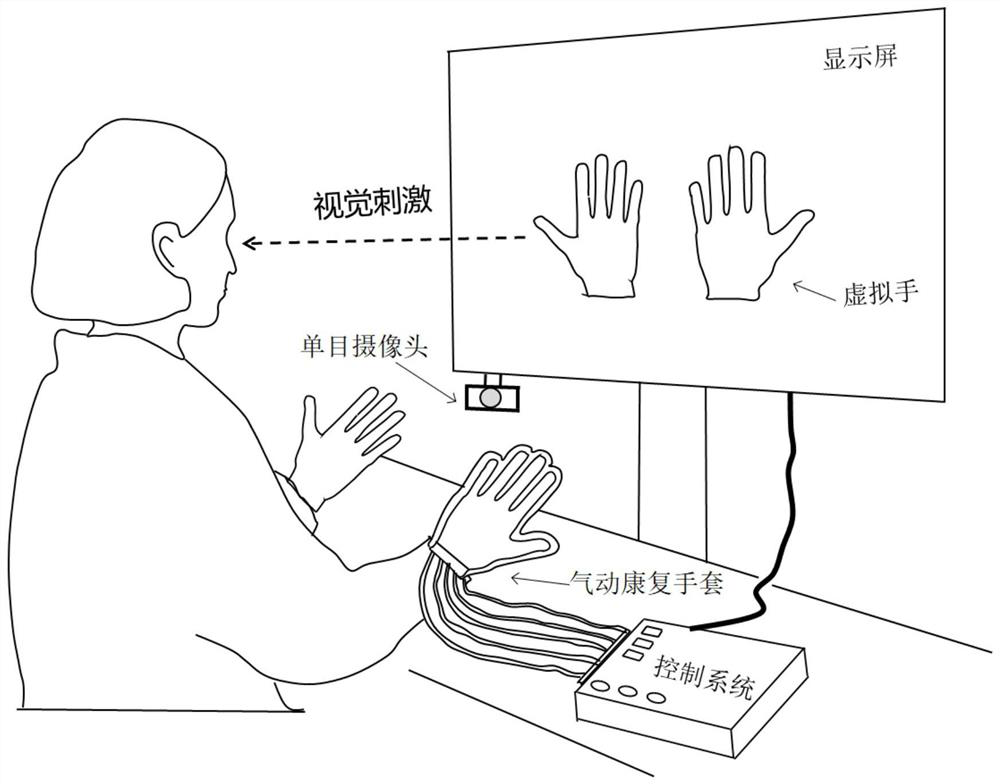
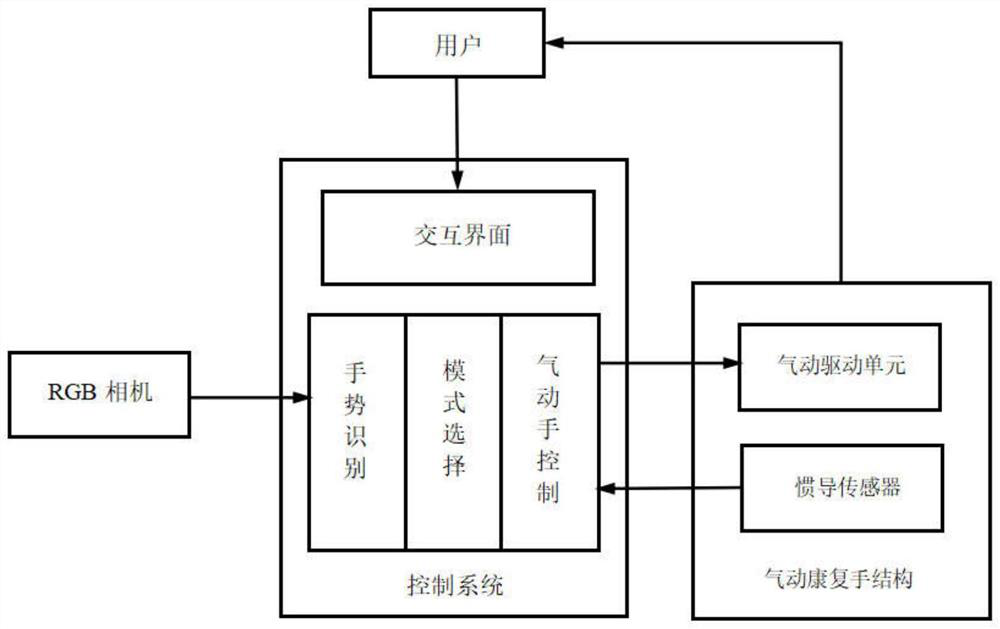
[0071] The specific operation of the multi-modal hand rehabilitation system based on monocular vision guidance in this embodiment is as follows: figure 1 shown, figure 1 The patient wears the rehabilitation gloves on the affected hand, selects the rehabilitation training mode through the controller, and then the system controls the pneumatic rehabilitation gloves to drive the affected hand according to the corresponding mode. At the same time, the patient can observe the screen in front of him, and the virtual The hand will perform the same movement, and through visual feedback, the patient can generate brain nerve stimulation of the voluntary movement of the hands and stimulate the reconstruc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com