Dynamic parafoil semi-physical simulation system based on active-disturbance-rejection decoupling control strategy
A semi-physical simulation and decoupling control technology, which is applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of high model complexity of powered parafoil systems, difficulty in using control algorithms for model information, and insufficient adjustment accuracy. problems, to achieve the effect of convenient data analysis and processing, short verification cycle and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make those skilled in the art better understand the technical solutions of the present invention, the present invention will be further described in detail below with reference to the accompanying drawings and the best embodiments.
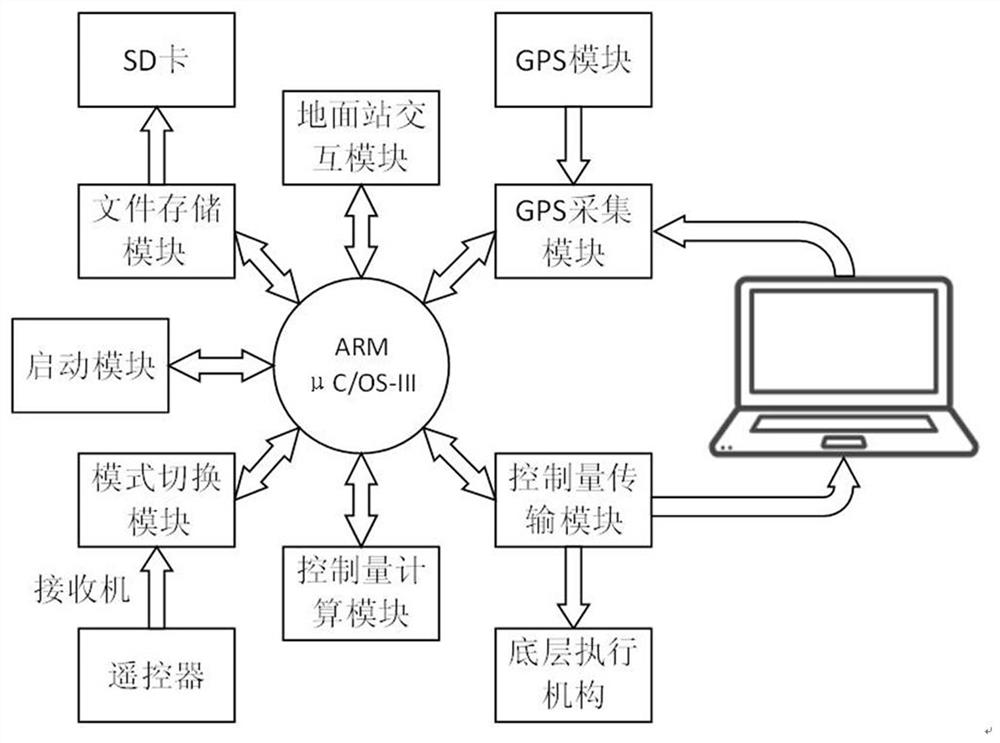
[0058] like figure 1 As shown in the figure, the present invention provides a hardware-in-the-loop simulation system for a powered parafoil based on an active disturbance rejection decoupling control strategy, which is characterized in that it includes a control algorithm based on ADRC decoupling and an 8-DOF parafoil implemented by Matlab software on the PC side. System dynamics model, the control algorithm based on ADRC decoupling is executed by the flight controller in the hardware platform, and the control quantity calculated by the flight controller is transmitted to the 8-DOF parafoil system dynamics model through the RS232 serial port, and the flight controller Through the lightweight real-time operating system μC / OS-III,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com