Path planning method based on improved A* algorithm in off-road environment
A path planning and environmental technology, applied in two-dimensional position/channel control and other directions, can solve the problems of many path inflection points, easy to fall into local optimum points, low algorithm efficiency, etc., and achieve the effect of intelligent and efficient algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
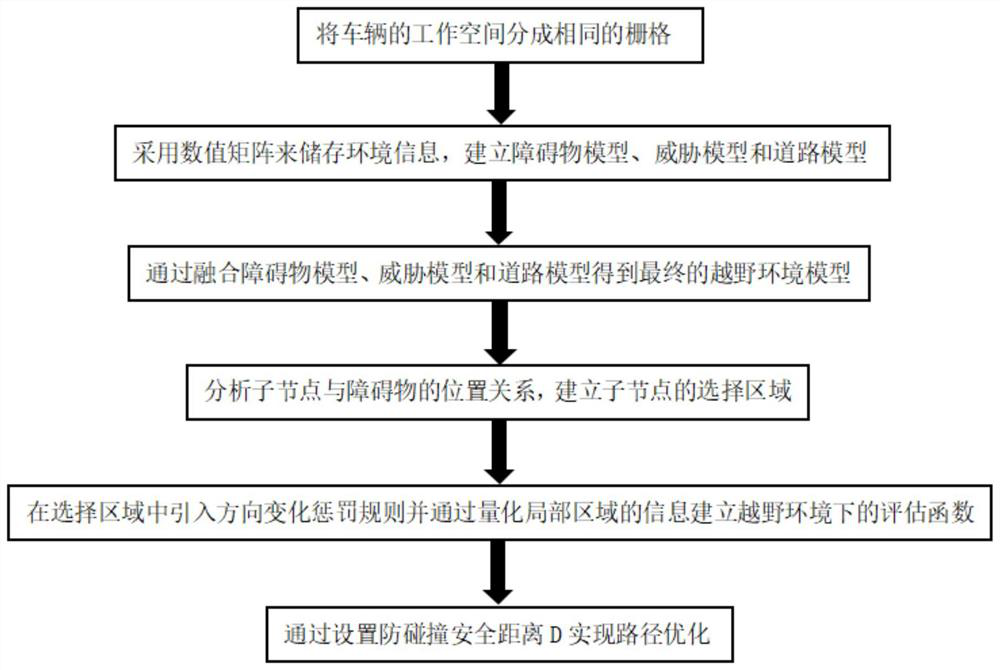
[0056] see Figure 1 to Figure 6 , the invention provides a path planning method based on an improved A* algorithm in an off-road environment, including the following steps: A1: Divide the working space of the intelligent vehicle into grids of the same size, use a numerical matrix to store environmental information, and establish obstacles object model threat model and road model And fuse to get the final off-road environment model
[0057]
[0058] in, obstacle model, for the threat model, for the road model;
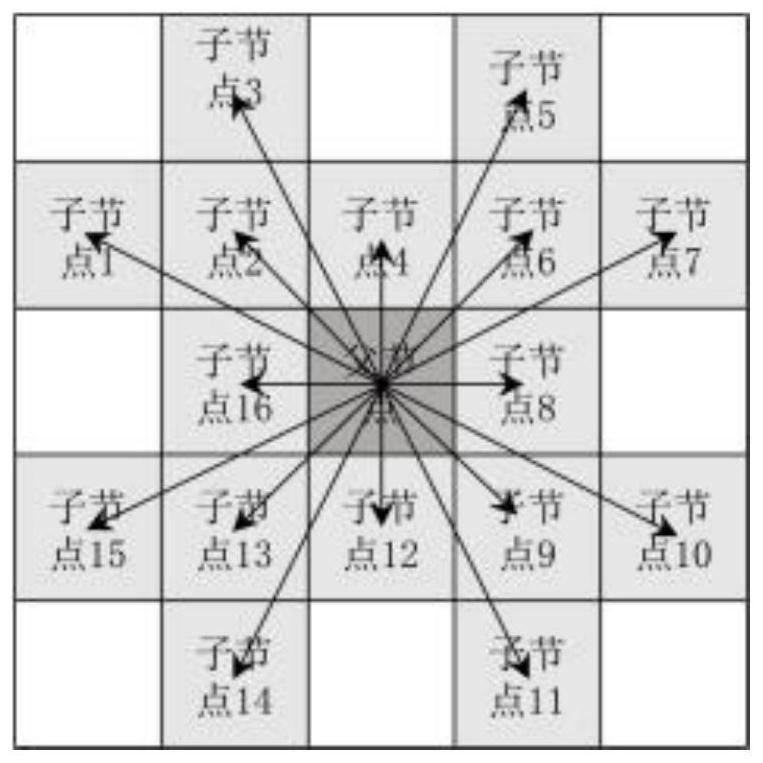
[0059] A2: Analyze the positional relationship between the child node and the obstacle, and establish the selection area (i, j) of the child node;
[0060] A3: Introduce the direction change penalty rule in the sub-node area and establish the off-road environment by quantifying the information of the local area The evaluation function below:
[0061] f(n)=R t (g(n 父 )+η*Step)+R o (h(n))
[0062]
[0063]
[0064] Among them, f(n) is the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com