Unmanned aerial vehicle navigation docking method based on distance measurement
A technology for distance measurement and drones, applied in non-electric variable control, three-dimensional position/channel control, instruments, etc., can solve the problems that the accuracy depends on the signal, and it is difficult to guarantee the accuracy of drone navigation and docking, so as to ensure the accuracy , save deployment and maintenance costs, and save calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
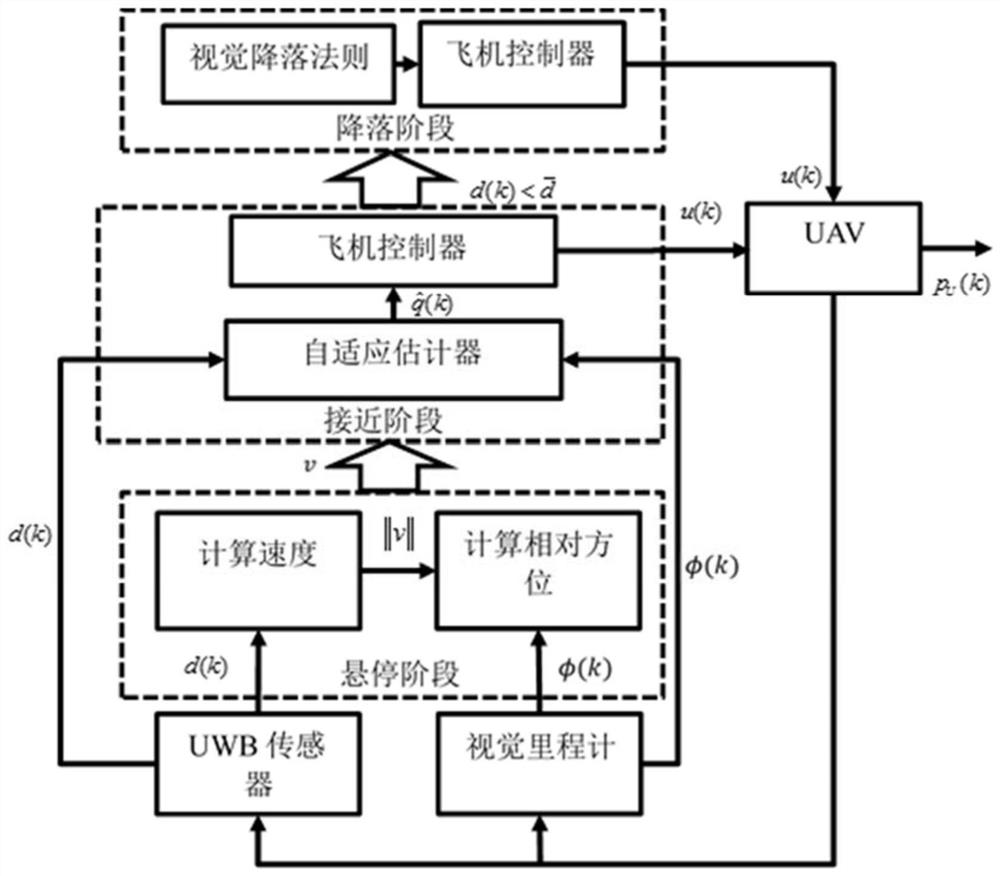
[0062] like figure 1 As shown, a UAV navigation docking method based on distance measurement, including the following steps:
[0063] S1. Obtain the distance information between the UAV and the MP, and the displacement of the MP. Among them, the distance information between the UAV and the MP is acquired through UWB sensors, and the UWB sensors are respectively installed on the UAV and the MP. superior;
[0064] The displacement of MP is specifically collected and obtained through the visual odometer, which is installed on the UAV;
[0065] S2. According to the distance information and the displacement obtained in step S1, the velocity of the MP and the relative position between the UAV and the MP are respectively calculated during the hovering phase;
[0066] S3, according to the distance information between the current drone and the MP, and the displacement of the current MP, combined with the speed of the MP obtained in step S2, and the relative position between the drone...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com