Manipulator training simulation system and method
A simulation system and operator technology, applied in the field of operator training, can solve problems such as high cost, poor reproducibility, and low operator efficiency, and achieve the effects of improving efficiency, improving reproducibility, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
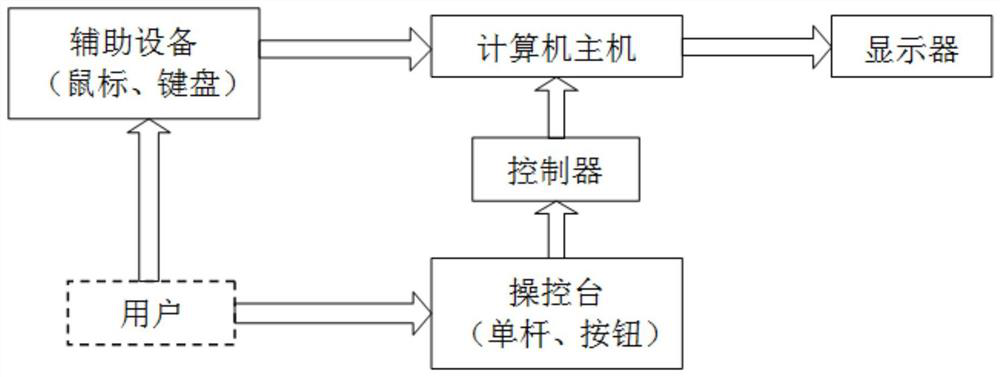
[0038] The embodiment is basically as attached figure 1 shown, including:
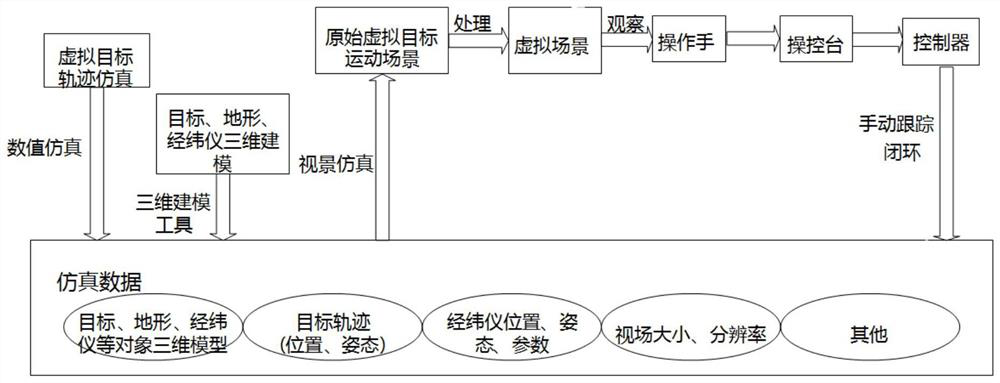
[0039] A target trajectory simulation module, the target trajectory simulation module is used to set up a simulation model according to off-site experimental data and target motion characteristics to carry out target trajectory simulation, to obtain the required target trajectory for training;
[0040] Visual scene simulation module, described visual scene simulation module is used for scene rendering, creates virtual scene;
[0041] A three-dimensional model modeling module, the three-dimensional model modeling module is used to construct a virtual object in a virtual scene, and the virtual object includes a controlled device and a target;
[0042] A console, the console includes a single lever and a button, the single lever is used to input a single lever signal to the controller, and the button is used to input a button signal to select a simulation function and a simulation mode;
[0043] A contr...
Embodiment 2
[0048] The only difference from Embodiment 1 is that it also includes an error generation module and a miss amount obtaining module, and the error generation module and the miss amount obtainment module are also integrated on the computer host; The maximum value and the minimum value of the random error detected during the working process of the equipment generate random numbers, and the error generation module is used to output random numbers to the controlled equipment; The relative position of the target is used to calculate the theoretical miss amount of the target, and the miss amount calculation module is used to determine the operation training effect of the operator according to the theoretical miss amount.
[0049] After the operator inputs a single-lever signal to the controller for operation training, the error generation module MATLAB software generates random numbers according to the maximum and minimum values of random errors detected during the working process ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com