Software-in-the-loop calibration method for lane keeping curve feedforward
A lane keeping and calibration method technology, applied in the field of automatic driving, can solve problems such as low test case coverage, insufficient test scenarios, and low matching efficiency, and achieve the effects of rapid iterative optimization, improved coverage, and efficient matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions in the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention.
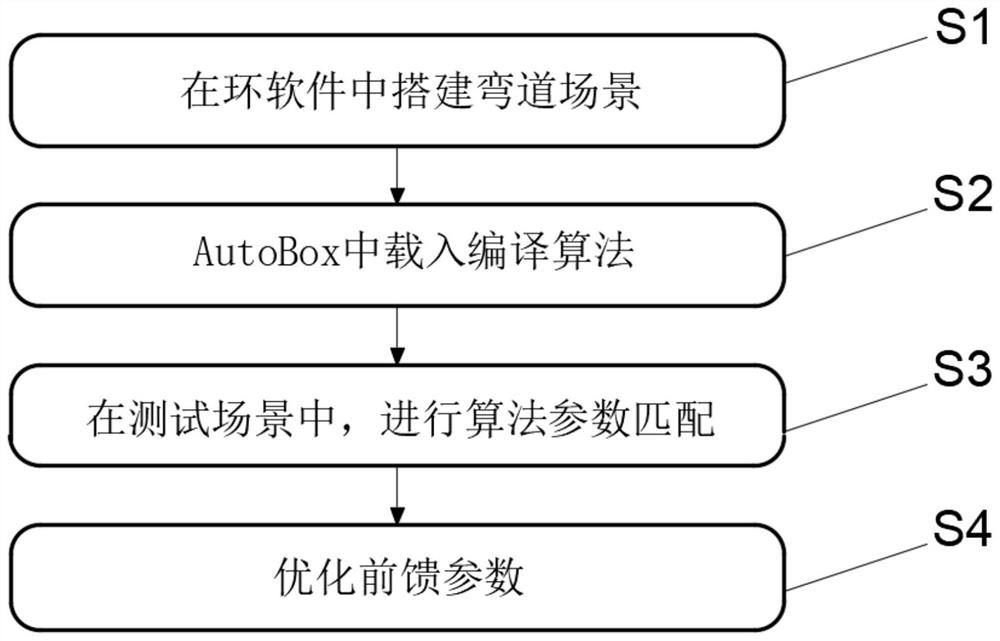
[0020] like Figure 1-2 As shown, a software-in-the-loop calibration method for lane keeping curve feedforward, including the following steps:
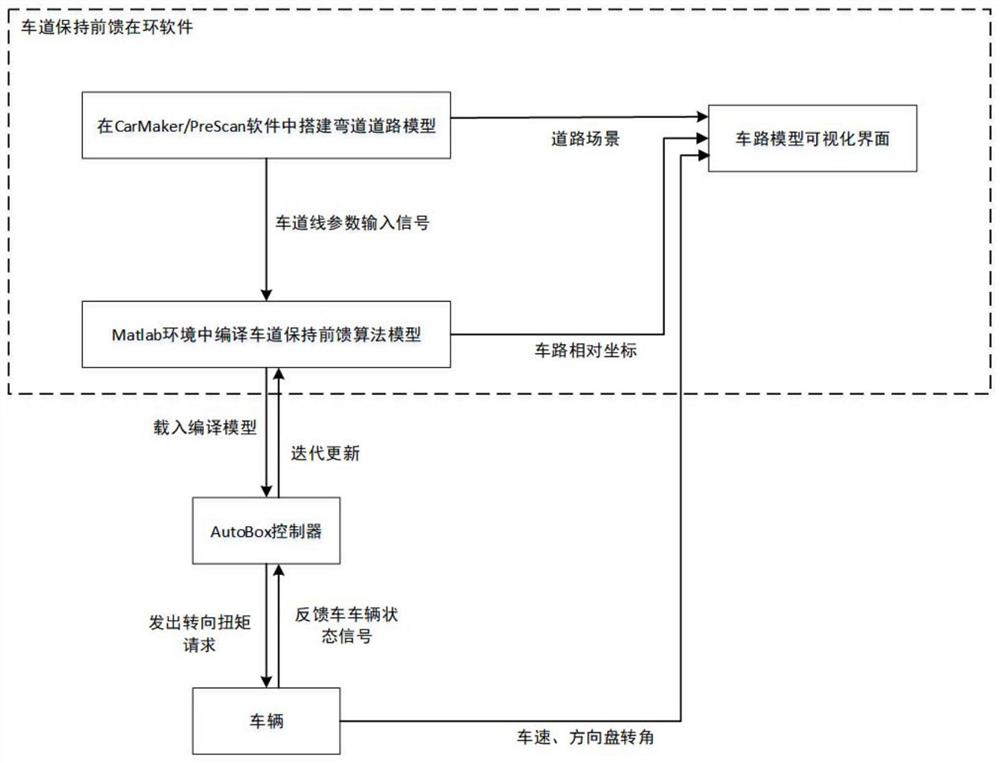
[0021] Step S1: Build a curve scene environment, design test cases with different radii such as 100m, 150m, 200m... 1000m, 1500m, 2000m, 5000m, etc., and simulate the visual camera characteristics based on the road model to construct the left and right lane line parameter input signals, using CarMaker or Prescan commonly used software to build curve road models;
[0022] Step S2: By using the lane line parameter signal in the curved road model as the input signal of the lane keeping feedforward algorithm in the Matlab environment, construct the feedforward contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com