Tire road adhesion coefficient multi-model fusion estimation method considering quality mismatch
A road surface adhesion coefficient and fusion estimation technology, applied in the field of vehicle control, can solve the problems of obvious differences in vehicle quality, impossibility of application, large estimation deviation, etc., and achieve the effect of improving estimation accuracy and scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
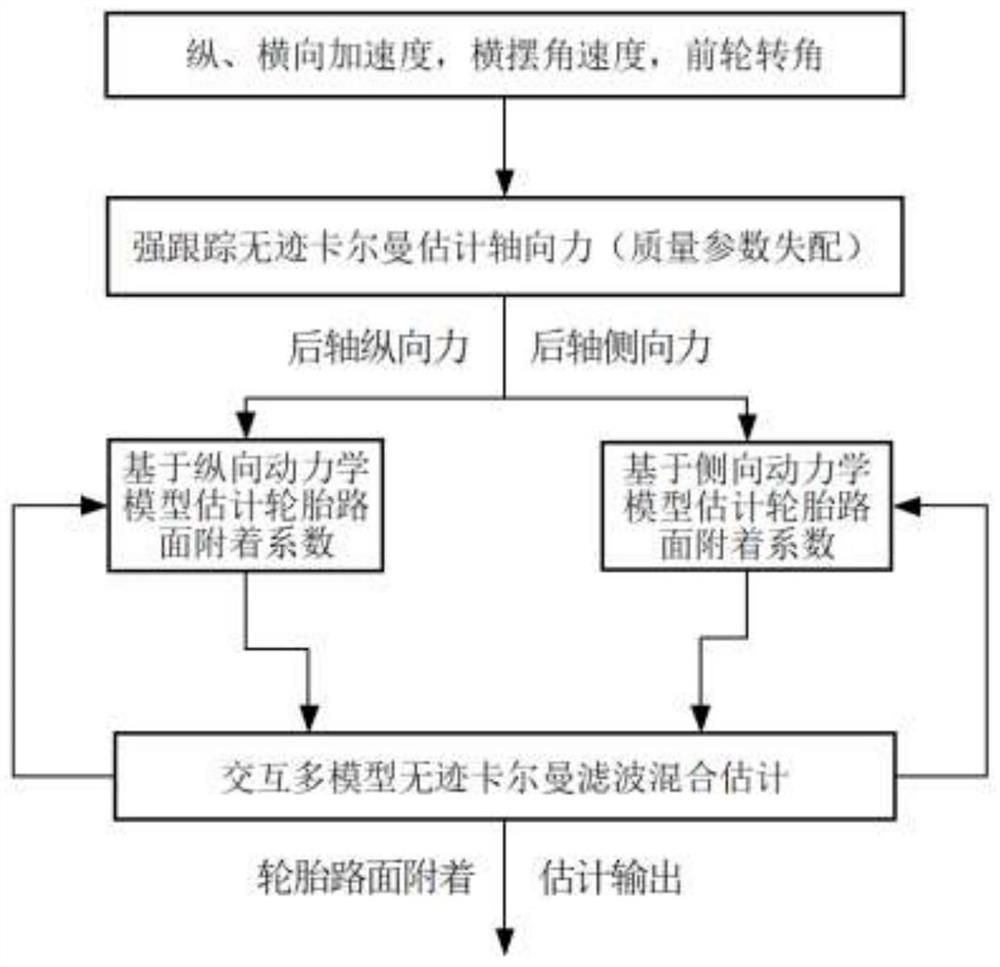
[0113] Such as figure 1 as shown,
[0114] The present invention first utilizes vehicle-mounted sensors to obtain longitudinal and lateral accelerations, yaw angular velocities and front wheel angle signals, utilizes these information and non-linear vehicle models and utilizes strong tracking unscented Kalman filtering to estimate the longitudinal and lateral forces of the front and rear axles of the vehicle, based on Vehicle Axial Force Information Using Interactive Multi-Model Unscented Kalman Estimation of Tire-Pavement Adhesion Coefficient.
[0115] The specific implementation method based on the system structure includes the following steps:
[0116] Step 1: Obtain the longitudinal, lateral acceleration and yaw rate through the gyroscope installed on the car, and obtain the front wheel angle information through the front wheel angle sensor;
[0117] Step 2: Establish a nonlinear body model,
[0118]
[0119]
[0120]
[0121] where r is the yaw rate, F yf is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com