


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Construction machine
A technology for construction machinery and operating machines, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, instruments, etc., which can solve the problem of reduced operating efficiency, GNSS positioning is no longer implemented, and location and location cannot be provided. location information etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
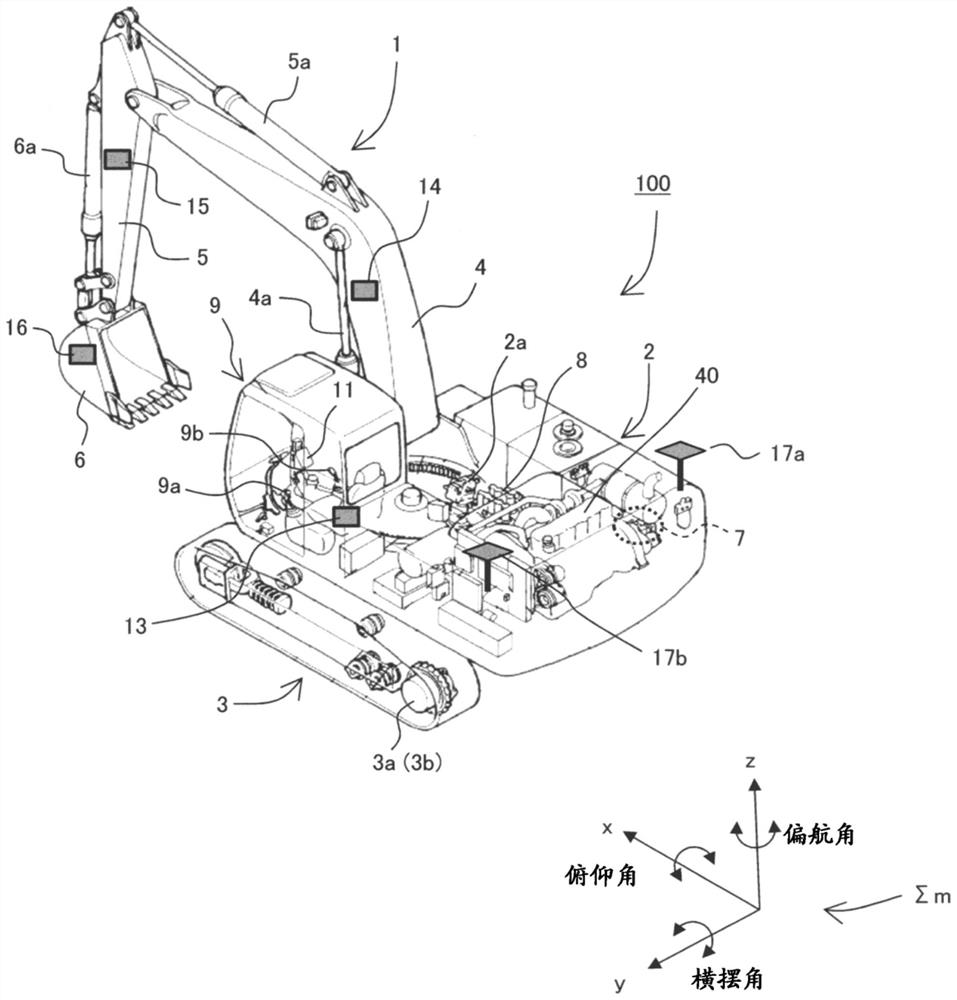
[0046] figure 1 It is a figure which shows the external appearance and a part of internal structure of the hydraulic excavator which is an example of the construction machine of this invention.
[0047] exist figure 1 Among them, the hydraulic excavator 100 includes: a multi-joint type front working machine 1 configured by connecting a boom 4, an arm 5, and a bucket (work piece) 6 as a plurality of driven parts that rotate in the vertical direction; Together with the upper revolving structure 2 and the undercarriage 3 constituting the vehicle body, the upper revolving structure 2 is mounted so as to be rotatable with respect to the undercarriage 3 . In addition, the base end of the boom 4 of the front working machine 1 is vertically supported on the front part of the upper swing body 2, and one end of the arm 5 is vertically supported on the front end of the boom 4. The other end of the rod 5 is supported by a bucket 6 so as to be rotatable in the vertical direction. The ...
no. 2 Embodiment approach
[0202] The first embodiment is a configuration using only sensors additionally attached to the hydraulic excavator 100 .
[0203] The second embodiment of the present invention achieves simplification or stabilization of calculation contents by utilizing sensors originally mounted on the hydraulic excavator 100 .
[0204] First, the features of this embodiment will be briefly described as follows.
[0205] In this embodiment, when the controller 20 judges the quality of the azimuth angle of the upper revolving body 2 calculated by the GNSS receiver 17c, it acts as the front working machine acquired by the boom IMU 14 (front attitude angle acquisition device). In order to reserve the posture angle of 1, the operation signal of the operating lever device 9a (first operating lever device) that instructs the lifting operation of the boom 4 (the operation of the front working machine 1) is input, and based on the operating signal of the operating lever device 9a, When the operatio...
no. 3 Embodiment approach
[0218] The first and second embodiments are embodiments in which a tilt angle detector represented by an IMU is used for the front working machine 1 , but the present invention can be implemented without using the tilt angle detector for the front working machine 1 .
[0219] First, the features of this embodiment will be briefly described as follows.
[0220] In the present embodiment, the hydraulic excavator 100 includes an image recognition device 35 (see Figure 8 ), the image recognition device 35 is based on at least one camera 30 or 32 or 33 (refer to Figure 8 ) to identify at least one of the attitude angle of the upper rotating body 2 and the attitude angle of the front working machine 1, and the controller 20 based on the attitude angle of the upper rotating body 2 recognized by the image recognition device 35 and the front working machine At least one of the attitude angles of 1 judges the quality of the azimuth angle of the revolving superstructure 2 calculated by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com