Intelligent vehicle dynamic obstacle avoidance path continuous planning method, system and storage medium
A dynamic obstacle avoidance and path planning technology, applied in control/regulation systems, vehicle position/route/height control, motor vehicles, etc., can solve problems such as no longer reliable, high collision risk, and affecting the safety of automatic driving, and achieve Enhance adaptability, improve real-time performance, and ensure the effect of curvature continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
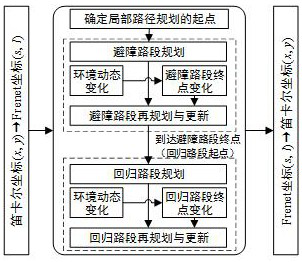
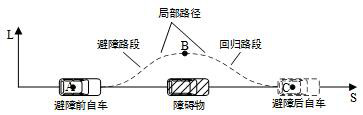
[0044] Such as figure 1 As shown, this embodiment provides a method for continuous planning of a dynamic obstacle avoidance path for an intelligent vehicle. In this embodiment, when planning the path, the real-time movement state of the obstacle is considered, and the local path of the vehicle is updated in real time with a certain time step, and the curvature is guaranteed to be continuous.
[0045] The method of this embodiment includes: building a local path planning framework based on the Frenet coordinate system; curvature continuity path planning based on Bezier curves; and real-time obstacle avoidance path update in a complex dynamic environment.
[0046] In this embodiment, a local path planning framework based on the Frenet coordinate system is constructed, including:
[0047] (1) The global path needs to be known. The global path on a structured road is usually the lane centerline, and the global path in an open environment is a static obstacle avoidance path from t...
Embodiment 2
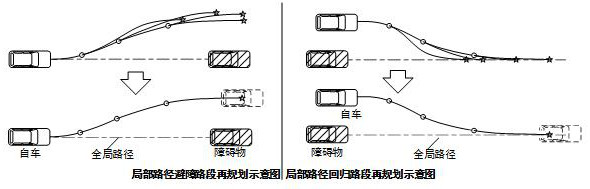
[0105] The present embodiment provides a dynamic obstacle avoidance path continuous planning system for smart cars, including: a building module for building a local path planning framework based on the Frenet coordinate system; a path planning module for performing local path planning and planning based on Bezier curves Re-planning, and the curvature of the re-planned path is continuous with the curvature of the originally planned path; the tracking driving module is used to track the vehicle according to the planned local path, obtain the movement state information of the obstacle at a predetermined time step, and When the motion state of the object changes, the path planning module is triggered to re-plan the path.
[0106] In this embodiment, the local path planning framework based on the Frenet coordinate system is constructed by building modules, and the conversion from Frenet coordinates to Cartesian coordinates is realized, and the real-time status information in the Ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com