VR-based nuclear radiation environment scene construction and man-machine interaction method
A human-computer interaction and environment technology, applied in the input/output of user/computer interaction, 3D modeling, mapping and navigation, etc., can solve problems such as weak interaction, low efficiency, and increased difficulty for operators to operate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be clearly and completely described below in conjunction with specific embodiments of the present invention and corresponding drawings.
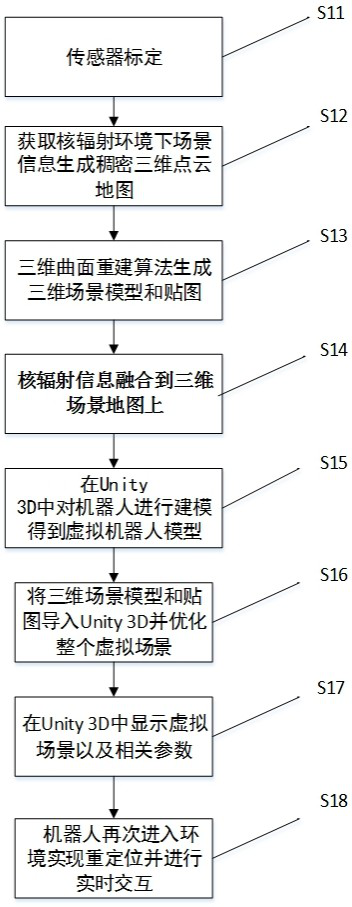
[0030] Such as figure 1 Shown is a flow chart of an embodiment of a VR-based nuclear radiation environment scene construction and human-computer interaction method of the present invention. An embodiment includes the following steps S11 to S18.
[0031] S11, sensor calibration, determine the internal reference of RGBD camera and IMU, the calibration of external reference of RGBD camera and nuclear radiation detector and IMU and RGBD camera;
[0032] In one embodiment of the present invention, the nuclear radiation detector can use a gamma camera, and the external reference between the RGBD camera and the gamma camera includes two parts: the relative pose value of the RGBD camera and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com