Method for improving cleaning coverage rate of movable cleaning robot and system thereof
A cleaning robot and coverage technology, applied in cleaning machinery, cleaning equipment, machine parts, etc., can solve problems such as limited MCU computing power, gyroscope output angle drift, map physical space error, etc., to improve cleaning coverage, The effect of solving incomplete cleaning and improving intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
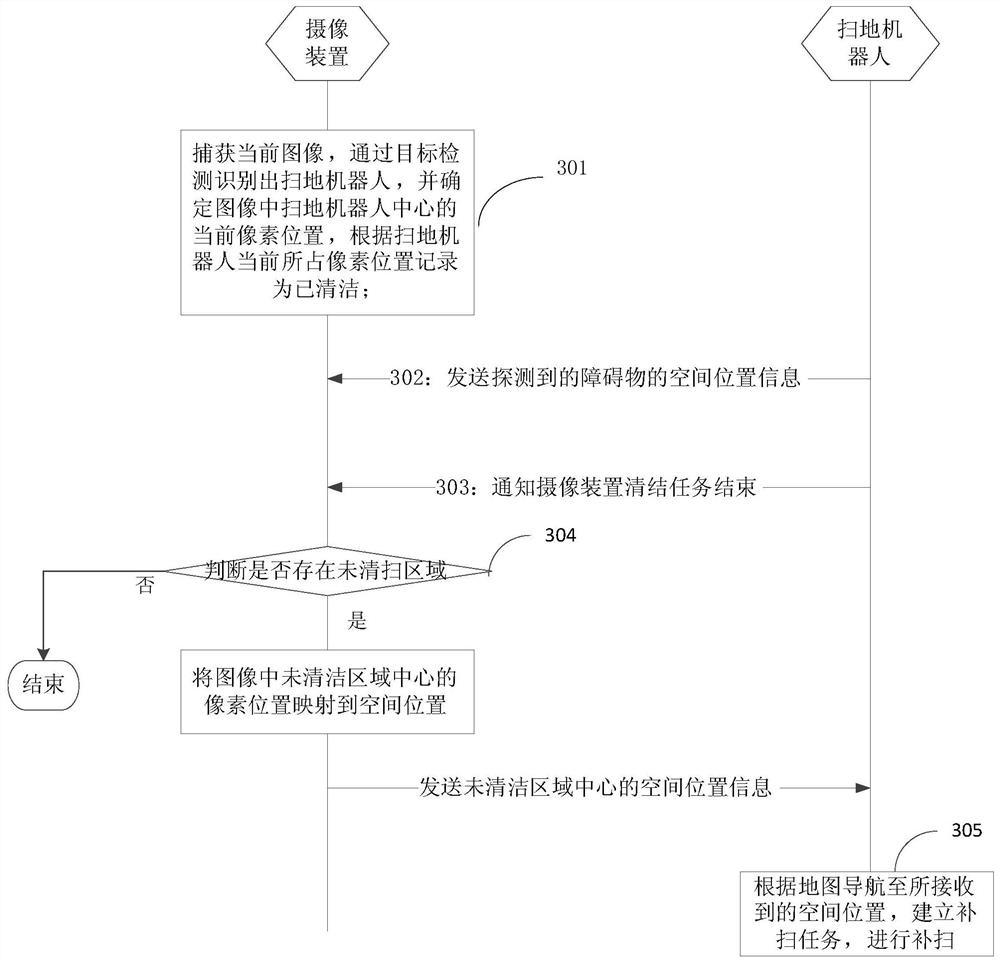
[0081] see image 3 as shown, image 3 It is a schematic flow diagram of the linkage between the camera device and the sweeping robot within its field of view to improve the cleaning coverage.
[0082] Step 301, the camera device records the cleaning path of the sweeping robot according to the captured multi-frame images of the sweeping robot;
[0083] In this step, the camera device captures the current image, recognizes the sweeping robot through target detection, and determines the current pixel position of the center of the sweeping robot in the image (u s , v s ), mark the pixel position occupied by the sweeping robot as cleaning;
[0084] Repeat step 301 to obtain multiple frames of images, determine the spatial position of the sweeping robot in each frame of image, and sequentially connect the pixel positions of the sweeping robot determined based on each frame to obtain the cleaning path trajectory of the sweeping robot in the image.
[0085] In step 302, the clean...
Embodiment 2
[0098] see Figure 5 as shown, Figure 5 It is a schematic flow diagram of the linkage between multiple camera devices and the sweeping robot for supplementary sweeping in this application. In this embodiment, the calibration information of each camera device has been obtained through the calibration process and stored in the body of the camera device respectively. Based on the calibration information, the FOV range of each camera device is converted into the FOV information at the spatial position according to Eq. Notify the sweeping robot; the sweeping robot saves the FOV spatial position information of each camera device, and further, can be mapped to the map.
[0099]Step 501, the sweeping robot locates the current spatial position according to the map, and judges the field of view of the current camera device according to the FOV spatial position information, that is, the sweeping robot determines which camera device or devices it is currently located in, so as to determ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com