A method and system for robot obstacle crossing control based on changing centroid
A control method and robot technology, which are applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems such as the inability to apply compound swing arm crawler robot over obstacle control, and achieve higher efficiency. performance and reliability, reduce system costs, and reduce operational difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
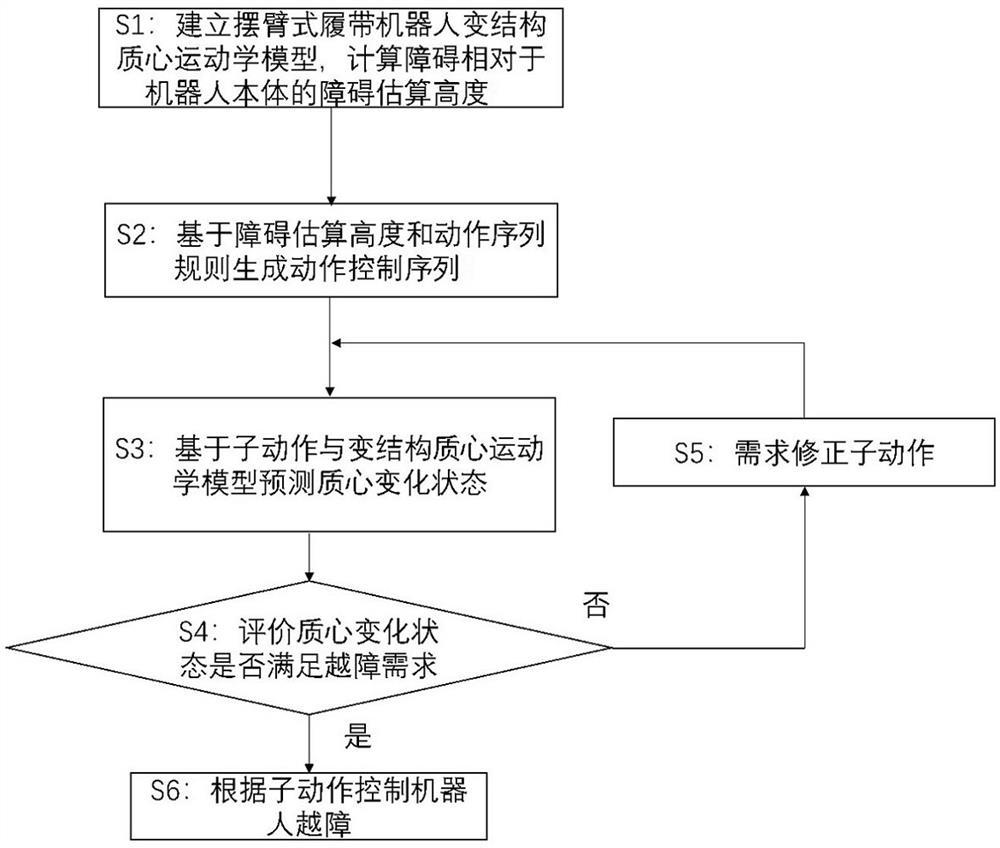
[0032] The first embodiment of the present invention relates to a robot obstacle-surmounting control method based on variable center of mass, including the following steps:
[0033] S1: Establish a variable-structure center-of-mass kinematics model of the swing-arm crawler robot, and calculate the estimated height of the obstacle relative to the robot body;
[0034] After determining the swing-arm crawler robot that needs to overcome obstacles, a variable-structure center-of-mass kinematics model is established according to the robot's parameter information for subsequent evaluation of the state of the center-of-mass change. Invariable analysis method, the present invention fully considers the impact of the center of mass on the stability of obstacle surmounting in the case of non-line-of-sight obstacle surmounting, and establishes a variable-structure centroid kinematics model to more accurately predict the attitude of the robot in the process of surmounting obstacles, and imp...
Embodiment 2
[0050] Further, the second embodiment of the present invention relates to a robot obstacle-surmounting control method based on variable center of mass, including the following steps:
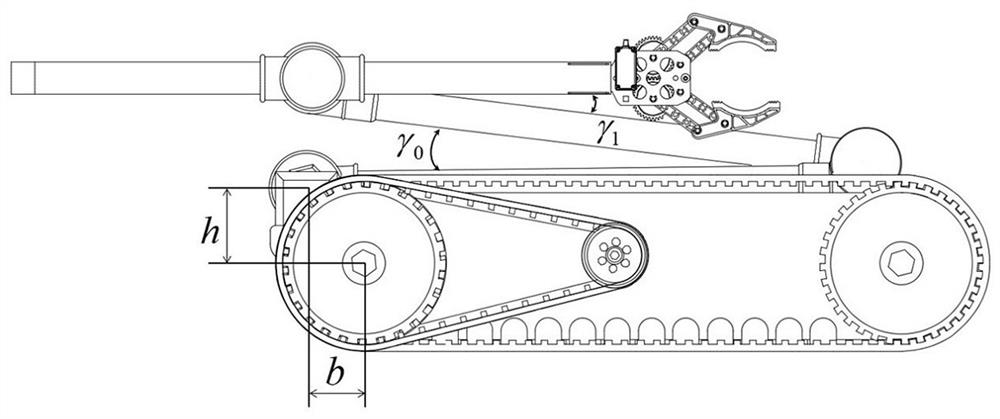
[0051] S1: Establish a variable-structure center-of-mass kinematics model of the swing-arm crawler robot, touch the top of the obstacle at the end of the robot arm, calculate the height of the obstacle, and calculate the estimated height of the obstacle relative to the robot body;
[0052] like image 3 , 4 As shown, the swing-arm crawler robot includes the initial state of the robot and the expanded state of the robot, and the variable-structure center-of-mass kinematics model of the swing-arm crawler robot is established. Among them, the swing arm crawler robot includes the main track, the front swing arm and the mechanical arm (big arm and small arm) and 5 joints (joint 0-joint 4) from bottom to top. in, is the opening angle of joint 3 and joint 4 in the initial state of the robot; are ...
Embodiment 3
[0119] The third embodiment of the present invention relates to a robot obstacle-surmounting control system based on variable center of mass, such as Figure 11 As shown, the robot obstacle control system includes upper computer, lower computer and sensors. The upper computer receives the sensor data and sets the travel speed, calculates the action control sequence according to the robot obstacle-surmounting control method based on the variable center of mass involved in the first or second embodiment, and sends the action control sequence to the lower computer; the lower computer is controlled by the DSP, according to the action The control sequence realizes the position control of the robot motors, and the robot motors include swing arm motors, travel motors and joint motors 1-3. The sensor is used to measure the state data of the robot. Potentiometers are installed on the robot swing arm motor, the joint motor of the manipulator and some transmission mechanisms to measure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com