


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Vehicle parameter detection method and system and storage medium
A vehicle parameter and detection method technology, which is applied in the traffic control system of road vehicles, radio wave measurement system, traffic control system, etc., can solve the problems of low accuracy, low efficiency, and high cost, so as to reduce detection costs and improve detection efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
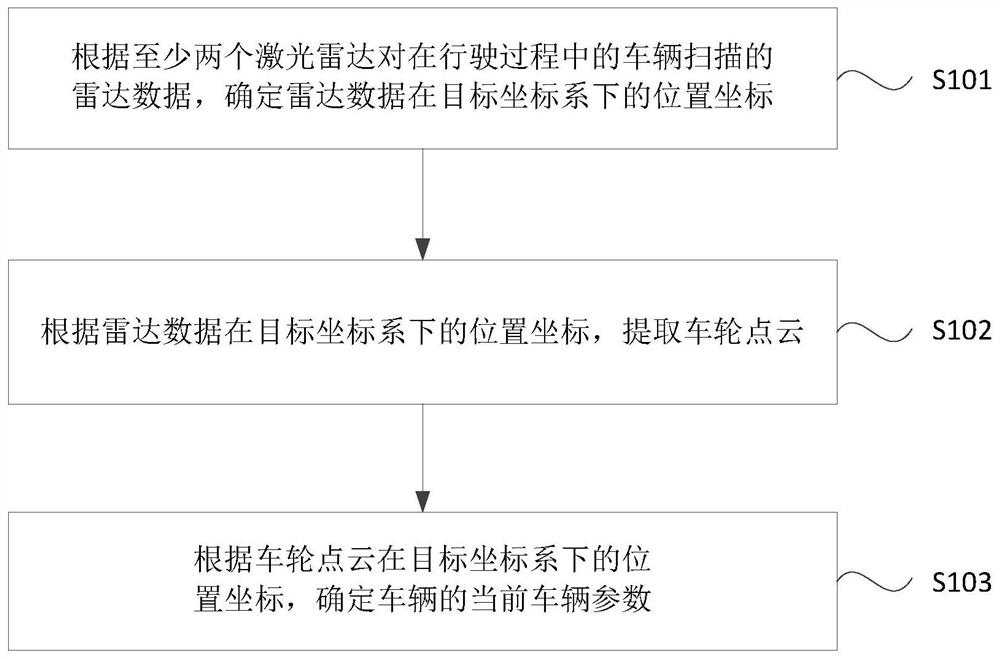
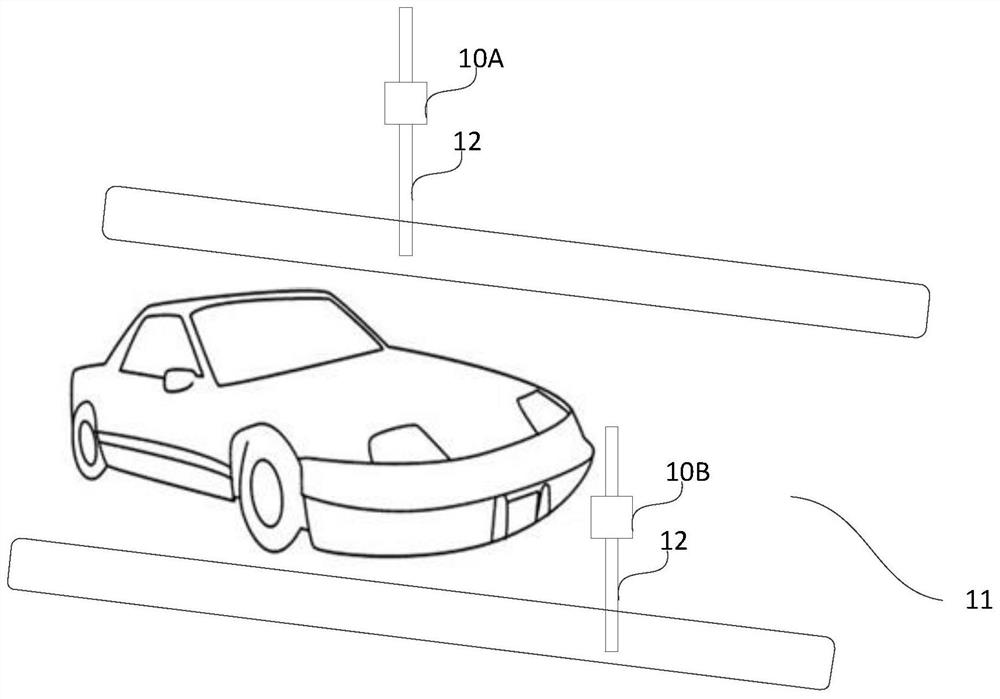
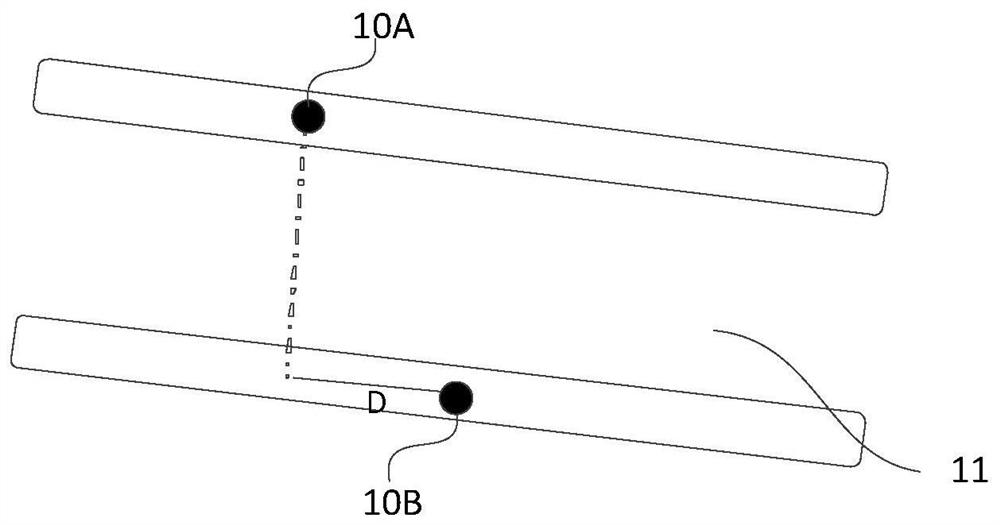
[0033] Figure 1A It is a flowchart of a vehicle parameter detection method in Embodiment 1 of the present invention; Figures 1B-1C It is a simplified schematic diagram of the installation position of the laser radar according to the embodiment of the present invention. This embodiment is applicable to the situation where at least two laser radars are used to automatically detect the vehicle parameters of the driving vehicle. The method can be executed by the vehicle parameter detection device according to the embodiment of the present invention, and the device can be realized by software and / or hardware. like Figures 1A-1C As shown, the method specifically includes the following steps:
[0034] S101. Determine the position coordinates of the radar data in the target coordinate system according to the radar data scanned by at least two laser radars for the vehicle during driving.
[0035] Wherein, the at least two laser radars used in the embodiment of the present inventio...
Embodiment 2
[0049] figure 2 It is a flow chart of a vehicle parameter detection method in Embodiment 2 of the present invention. This embodiment is based on the above-mentioned embodiments, and further optimization is carried out. Specifically, when the laser radar is a single-line laser radar, how to according to at least The specific situation of determining the position coordinates of the radar data in the target coordinate system for the radar data scanned by the vehicle during driving by the two laser radars is introduced. Specifically, such as figure 2 As shown, the operation process includes the following steps:
[0050] S201. Determine the driving speed of the vehicle according to the multi-frame radar data scanned by at least two laser radars for the vehicle during driving and the misalignment distance of the at least two laser radars.
[0051] Specifically, it may be to select a vehicle position point on the vehicle that can be collected by laser radars on both sides of the ...
Embodiment 3
[0063] Figure 3A It is a flowchart of a vehicle parameter detection method in Embodiment 3 of the present invention, Figure 3B It is a schematic diagram of the effect of the vehicle point cloud extracted in Embodiment 3 of the present invention; Figure 3C It is a schematic diagram of the effect of the wheel point cloud extracted in the third embodiment of the present invention; this embodiment is based on the above-mentioned embodiment, and further optimization is carried out, specifically how to use the position coordinates of the radar data in the target coordinate system , the specific situation of extracting the wheel point cloud is introduced. Specifically, such as Figures 3A-3C As shown, the operation process includes the following steps:
[0064] S301. Determine the position coordinates of the radar data in the target coordinate system according to the radar data scanned by at least two laser radars for the vehicle during driving.
[0065] Wherein, the at least ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com