Pose control method and optical navigation system and surgical robot system applicable to pose control method
A control method and optical navigation technology, applied in surgical navigation systems, surgical manipulators, surgical robots, etc., can solve problems affecting surgical efficiency and fluency, achieve high integration, wide application scenarios, and reduce infection effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
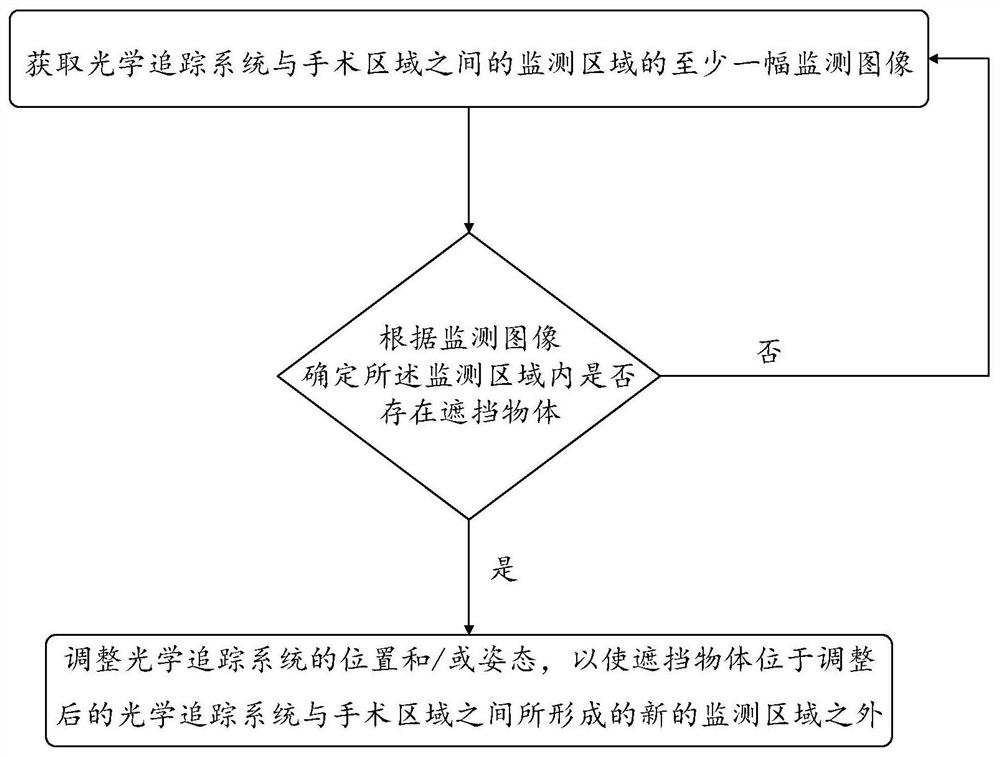
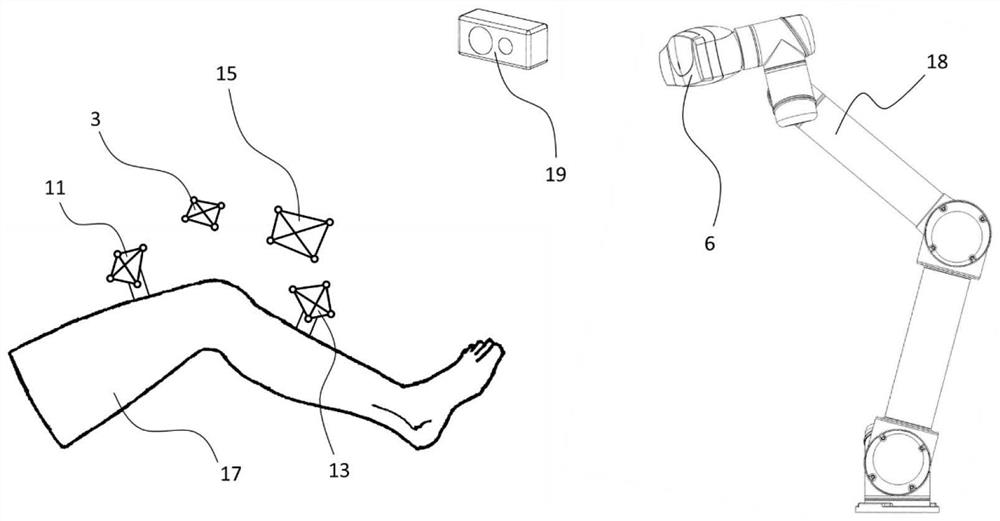
[0077] In the pose control method of the optical tracking system in Embodiment 1, the positioning device is used to obtain at least one monitoring image of the monitoring area. In this embodiment, the positioning device is used as a depth camera for detailed introduction, as shown in image 3 As shown, the positioning device uses the depth camera 19 to detect the monitoring area, and the specific pose control method can be as follows:
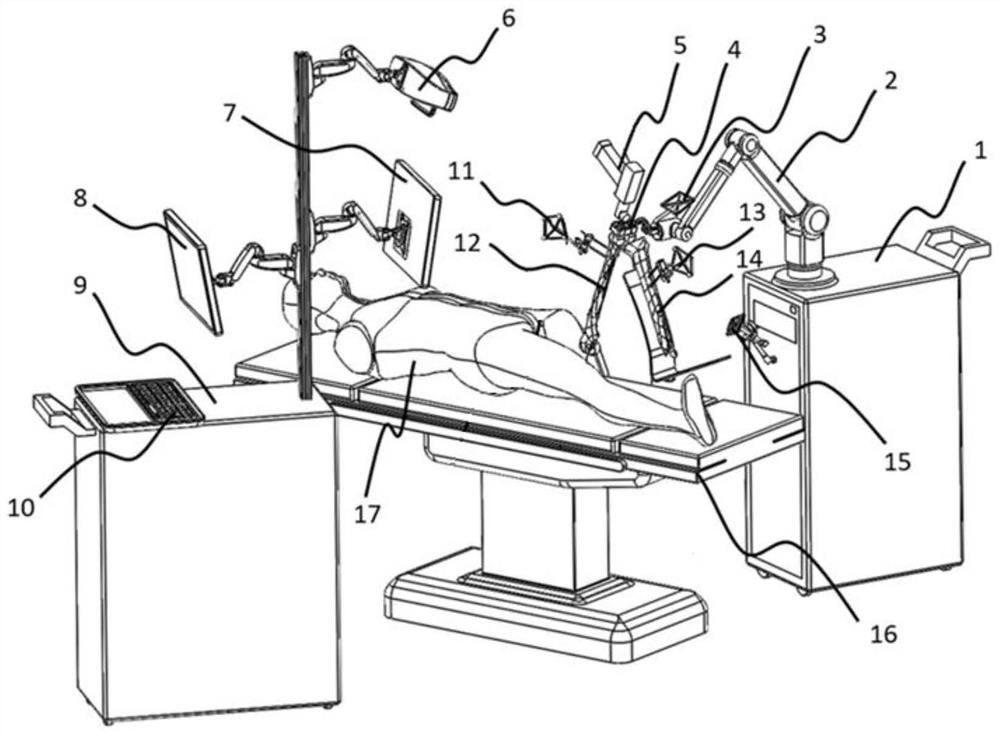
[0078] S1: first set and fix the optical markers, wherein the optical markers can include the femoral markers 11, tibial markers 13, tool markers 3 and base markers 15 set on the corresponding positions as described above, and the optical markers The tracking system 6 is installed on a supporting device, wherein the supporting device can be a mechanical arm 18, or other mobile platforms capable of moving. This embodiment takes the supporting device as the mechanical arm 18 as an example for introduction;
[0079] S2: The optical tracking system...
Embodiment 2
[0100] In Example 2, the positioning device uses a binocular camera to monitor obstacles, and the specific pose control method is as follows:
[0101] Y1: Similar to S1 in Example 1, first set and fix the optical markers, wherein the optical markers can include femoral markers 11, tibial markers 13, tool markers 3 and base markers 15 set on corresponding positions etc., the optical tracking system 6 is installed on the mechanical arm 18;
[0102] Y2: Similar to step S2 of Embodiment 1, the optical tracking system 6 tracks the position information of the optical marker in real time, and determines the monitoring area according to the position of the optical tracking system 6 and the optical marker;
[0103] Similarly, the optical tracking system 6 tracks the position information of the optical markers in real time, specifically including: according to the position information of a plurality of the optical markers, a minimum enclosing sphere 20 can be obtained, and a plurality o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com