A Dynamic Stability Judgment Method and a Dynamic Adaptive Attitude Control Method for a Robot
A dynamic self-adaptive and attitude control technology, applied in the field of dynamic self-adaptive attitude control and robot dynamic stability discrimination, can solve problems such as changes, low robustness, and difficulty in adapting, to overcome attitude errors, improve motion stability, eliminate The effect of the effect of momentary outliers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be described in more detail below with reference to the schematic diagrams. The advantages and features of the present invention will become more apparent from the following description. It should be noted that, the accompanying drawings are all in a very simplified form and in inaccurate scales, and are only used to facilitate and clearly assist the purpose of explaining the embodiments of the present invention.
[0036] First define the robot coordinate system, take the robot itself as the reference origin, the front is the positive X-axis, the left is the positive Y-axis, and the counterclockwise rotation is positive, that is, the front-rear direction along the X-axis, and the left-right direction along the Y-axis . The rotation angle around the forward axis is represented by the roll angle, and the rotation angle around the right axis is represented by the pitch angle.
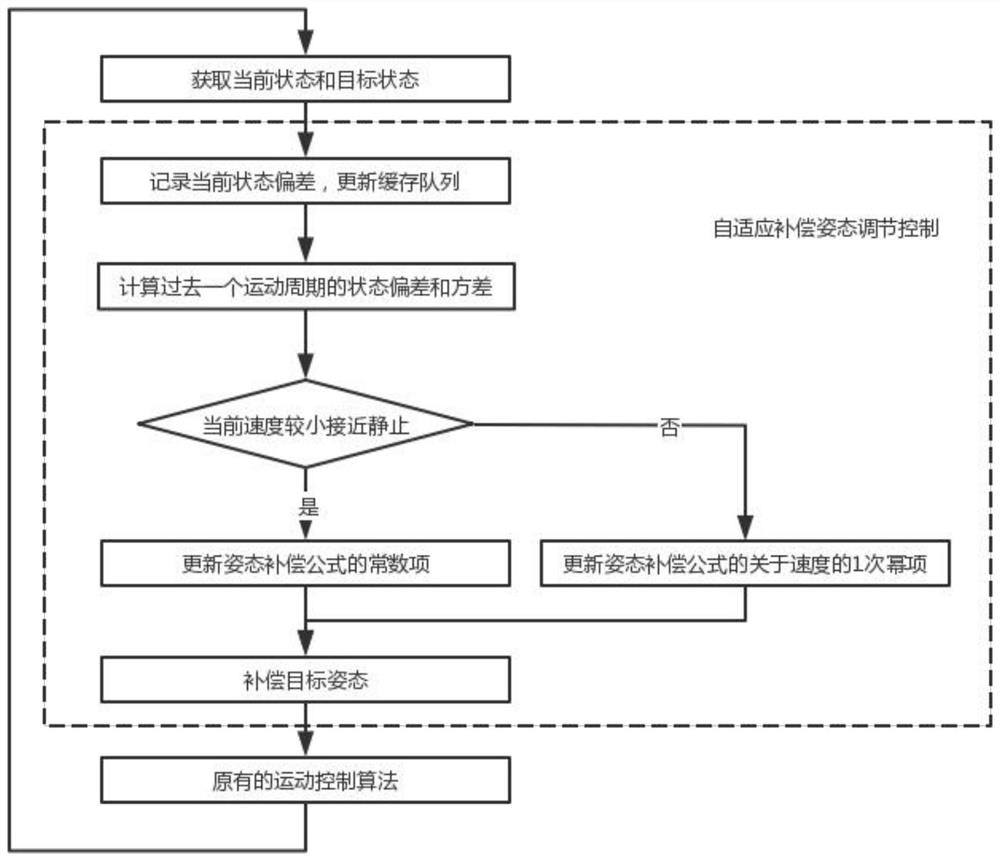
[0037] The invention provides a method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com