Autonomous positioning device and positioning method based on laser radar imaging
A lidar imaging and autonomous positioning technology, applied in the field of positioning and navigation, can solve the problems of wrong way, delay in transportation tasks, and easy loss of direction by drivers, and achieve the effect of ensuring reliability and real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
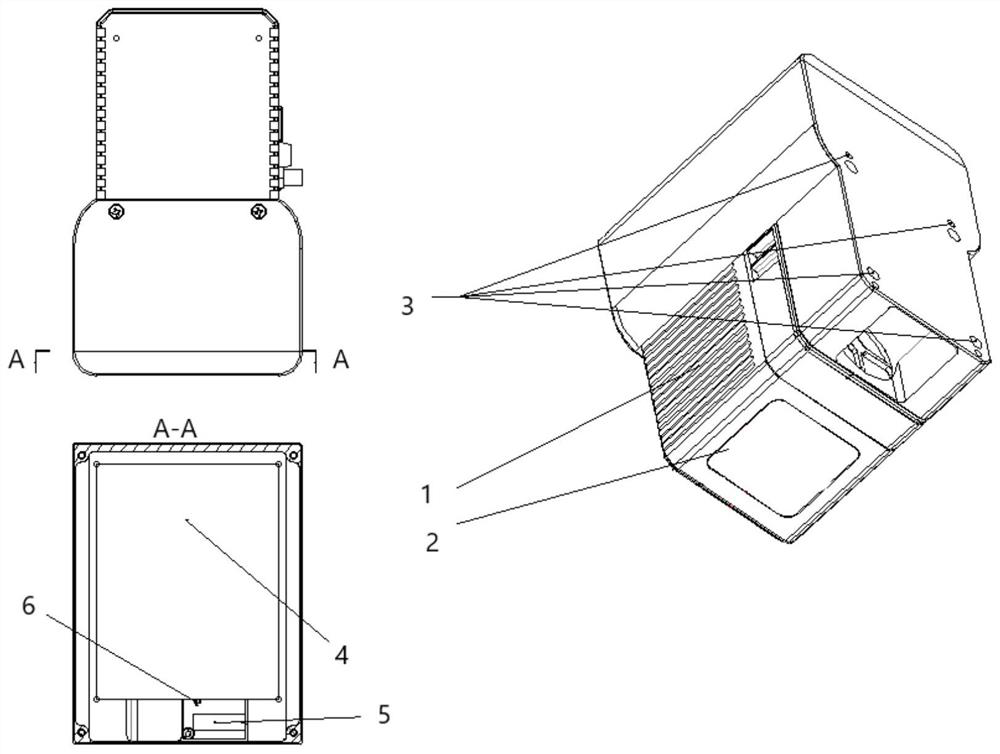
[0032] Such as figure 1 As shown, an autonomous positioning device based on laser radar imaging includes a housing, and the housing is provided with an imaging laser radar 1, a control memory 4 and an inertial measurement unit 5, and the imaging laser radar 1 and the inertial measurement unit 5 are respectively It communicates with the control memory 4, and the housing is installed on the corresponding bracket of the vehicle through the positioning hole 20.
[0033] The control memory 4 is provided with a clock chip 6, a matching positioning module and a storage module, and the matching positioning module controls the imaging laser radar 1 and the inertial measurement unit 5 to work, and the data collected by the imaging laser radar 1 and the inertial measurement unit 5 are uploaded To the storage module, the matching and positioning module is connected to the storage module in communication.
[0034] Specifically, the matching and positioning module controls the imaging lase...
Embodiment 2
[0044] The same part of this embodiment and Embodiment 1 will not be described again, the difference is:
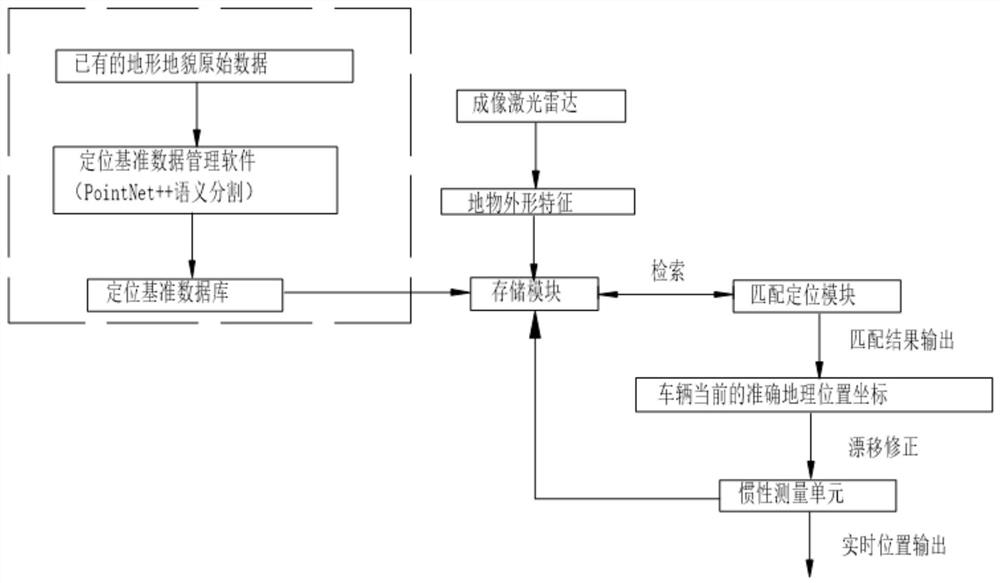
[0045] The imaging laser radar 1 emits a light beam 14 to collect the shape characteristic data of the overpass in front of the vehicle, and transmits the data to the storage module through the data cable between the control memory 4 and the imaging laser radar 1 . The inertial measurement unit 5 collects the linear acceleration and angular acceleration data during the running of the vehicle in real time, and calculates the position of the vehicle in real time according to the data refresh rate of 100Hz and above through the mature dead reckoning algorithm and the mature geodetic coordinate transformation algorithm and attitude data, and sent to the storage module. During the process of real-time collection of data collected by the imaging laser radar 1 and the inertial measurement unit 5, the storage module uses the high-precision clock chip 6 to time the collection time...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com