Quad-rotor unmanned aerial vehicle landing control method based on nonlinear disturbance observer
A four-rotor UAV, disturbance observer technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
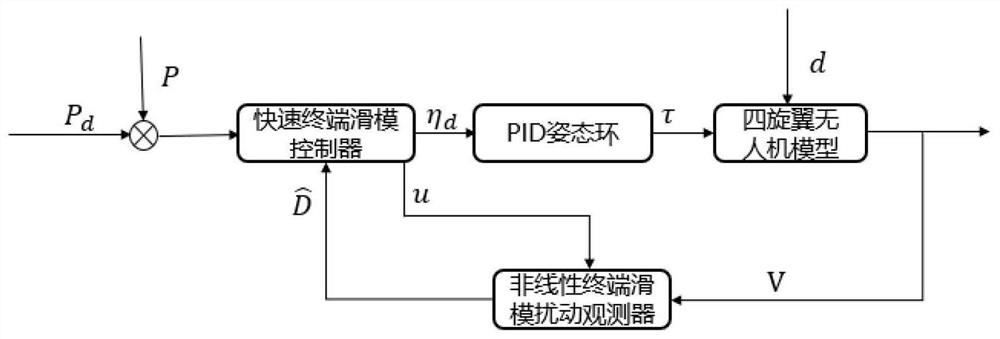
[0057] In order to overcome the deficiencies of the prior art, the present invention aims to propose a robust controller based on a nonlinear disturbance observer to better suppress the interference of the ground effect on the UAV during the landing process of the quadrotor UAV. For this reason, the technical scheme that the present invention adopts is, the four-rotor unmanned aerial vehicle ground effect compensation landing control method based on the nonlinear disturbance observer, comprises the following steps: establish the nonlinear dynamic model of the four-rotor unmanned aerial vehicle landing process, design The nonlinear terminal sliding mode finite-time convergence observer is designed, and then the nonlinear robust controller is designed to realize the landing control of the quadrotor UAV. Specific steps are as follows:
[0058] Step 1) determine the coordinate system definition of the quadrotor UAV;
[0059] The definition of the quadrotor UAV coordinate system m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com