Unmanned aerial vehicle searching method for underground multi-branch cave
A UAV, multi-branch technology, applied in the field of UAV exploration, can solve the problems of insufficient endurance, difficulty in large-scale exploration, and inability to develop the agility of small flying robots, so as to improve the exploration rate and safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
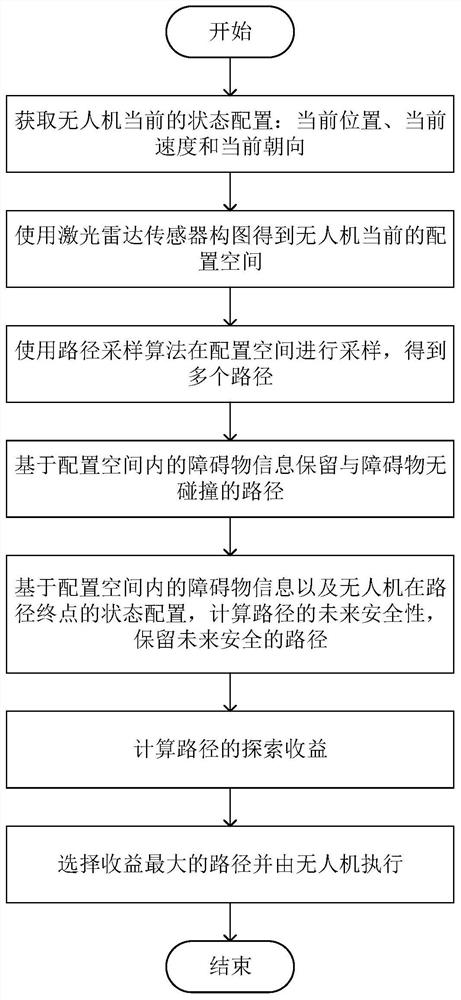
[0039] A drone exploration method for underground multi-branched caves, such as figure 1 shown, including the following steps:
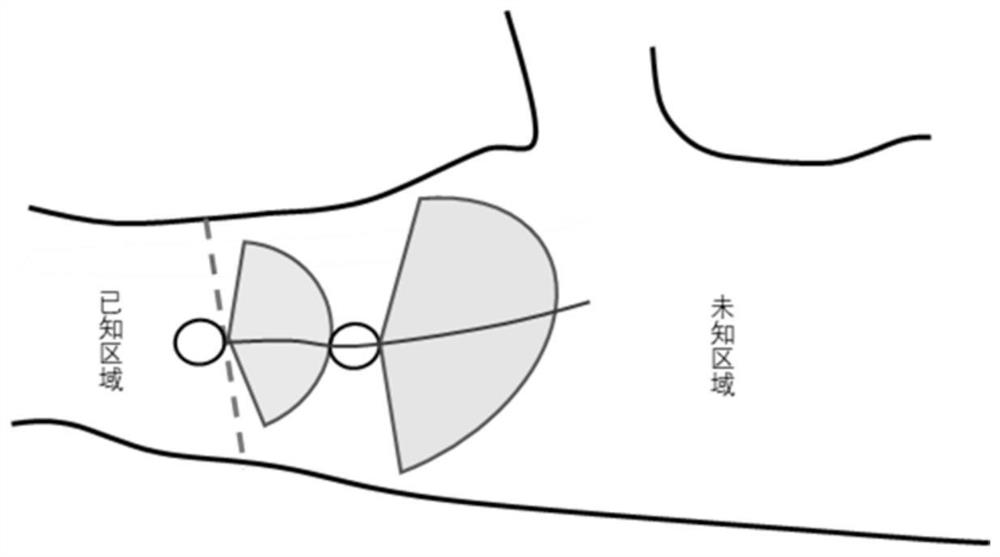
[0040] S1. Obtain the current state configuration of the drone, including the current position, current speed and current orientation, and use the laser radar sensor to obtain the current configuration space of the drone. The configuration space is the area to be explored in front of the drone;
[0041] The UAV is a four-rotor aircraft that can explore and fly autonomously in the tunnel. It is equipped with a lidar sensor and processor, and the battery is a single lithium battery. Using the lidar sensor, using the real-time composition and positioning method, the current configuration space is obtained. The map representation method used is a volume map based on the truncated symbolic distance field (TSDF), and the Euclidean symbolic distance field is used to represent the UAV and obstacles. the distance of the object. Given the limited onboard com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com