A Dynamic Programming Method for Unmanned Surface Vehicle
A technology of dynamic planning and unmanned boats, applied in the direction of non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of difficult dynamic obstacle modeling and fast obstacle avoidance, and achieve efficient and reliable real-time dynamic planning and path safety , good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
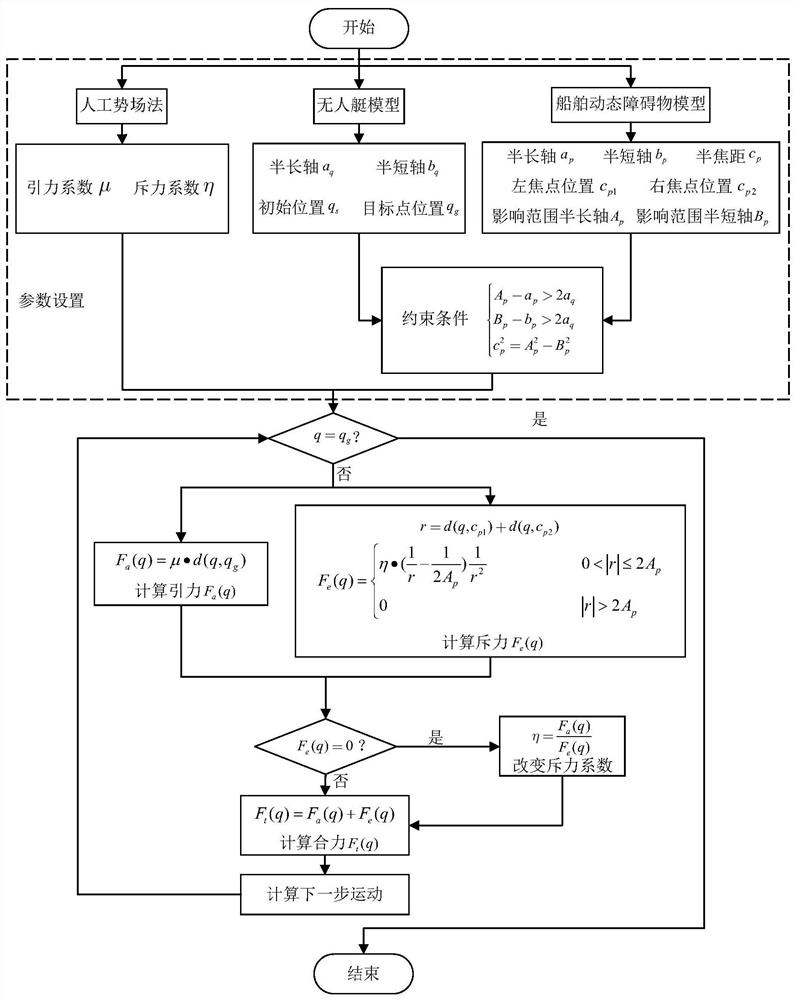
[0057] figure 1 It is a flow chart of the dynamic programming method for the surface unmanned vehicle of the present invention, comprising the following steps:
[0058] step 1:
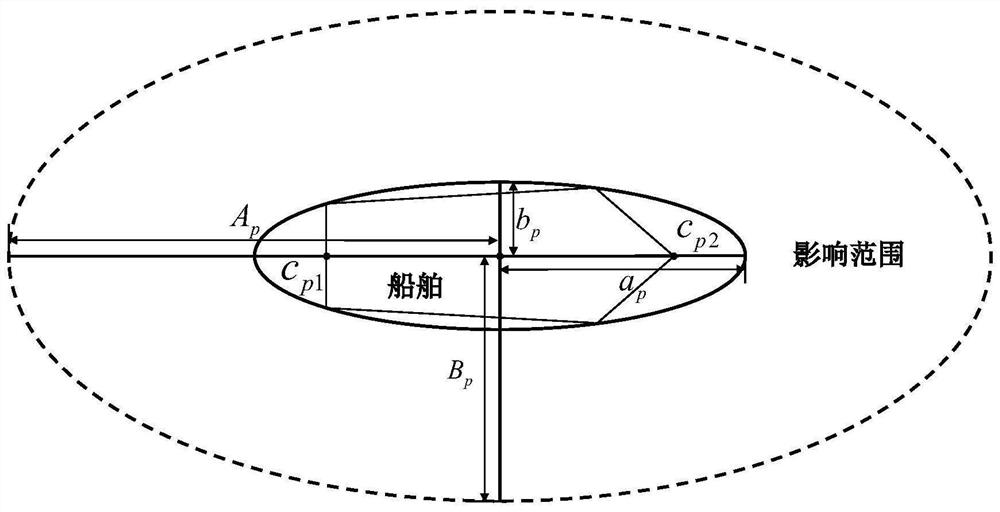
[0059] Set the gravitational coefficient μ and repulsive coefficient η in the artificial potential field method, and the semi-major axis a of the surface unmanned vehicle q , semi-minor axis b q , initial position q s and the target point position q g , the semi-major axis a of the ship dynamic obstacle model p , semi-minor axis bp , half focal length c p , left focus position c p1 and right focus position c p2 , the semi-major axis A of the influence range of dynamic obstacles on the ship p and semi-minor axis B p The following constraints must be met:
[0060]
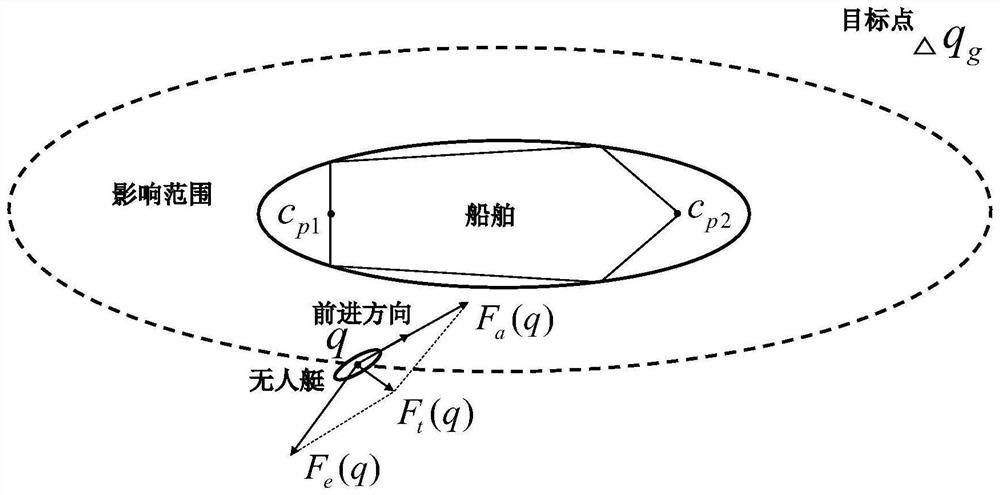
[0061] Ship dynamic obstacle model and its influence range such as figure 2 shown, and then go to step 2;
[0062] Step 2:
[0063] Determine whether the current position q of the surface unmanned boat has reached q g , if ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com