Instant positioning method and device in dynamic scene, equipment and storage medium
A dynamic scene and positioning method technology, applied in image data processing, instruments, calculations, etc., can solve problems affecting system positioning accuracy, A and B area feature matching errors, etc., to achieve real-time improvement, positioning accuracy improvement, and scalability strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
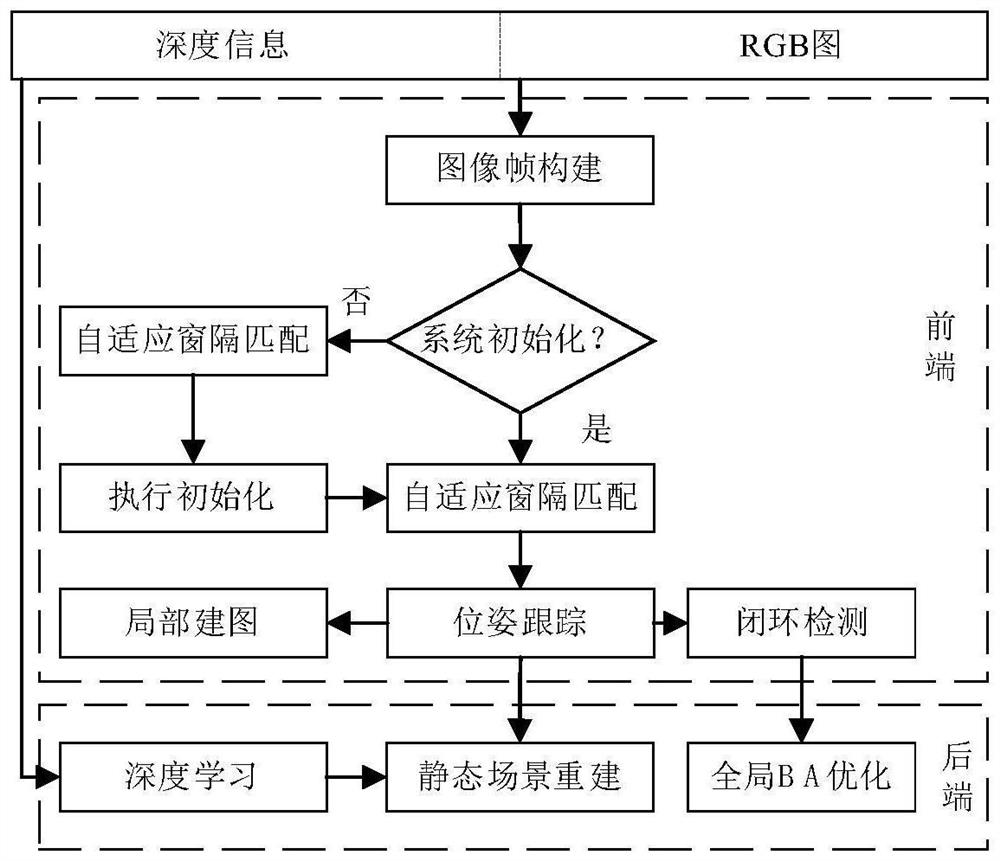
[0057] like image 3 As shown, a method for real-time positioning and map construction under a dynamic scene, comprising the following steps: comprising the following steps:
[0058] S1. Acquire video data, and perform image frame screening from the video data.
[0059] The set of all image frames is expressed as F={f 1 ,f 2 ,..., f N}, the set of fixed window image frames is W={f 1 ,f 2 ,..., f 8},in
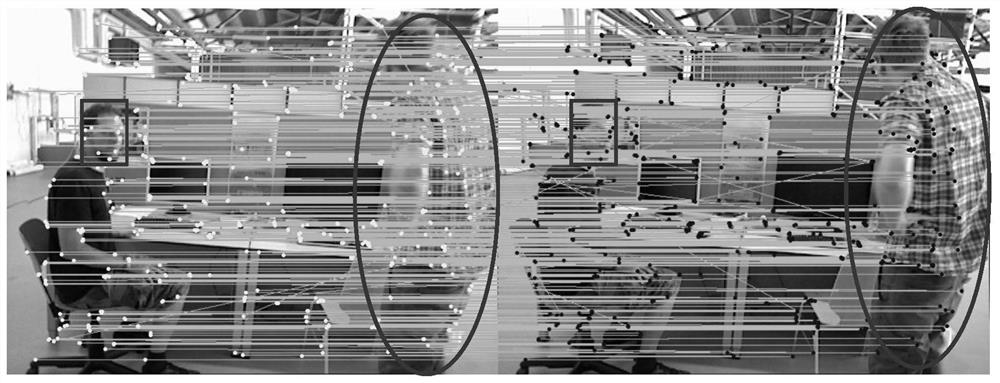
[0060] In order to eliminate the influence of dynamic objects, an adaptive window matching model is introduced. This method uses the inter-frame screening strategy to perform feature matching between the first frame image in the window and the xth (x≤8) frame image, where x-1 is the size of the window interval, and the window size is set to a fixed value of 8.
[0061] Select two frames of image f in window W 1 , f x Extract evenly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com