Strip mine unmanned mine truck dynamic path planning method based on improved TEB method
A dynamic path, open-pit mine technology, applied in the fields of mine optimization, intelligent driving, and mining system engineering, can solve problems such as mine truck operation safety, and achieve the effect of improving ride comfort and ensuring driving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
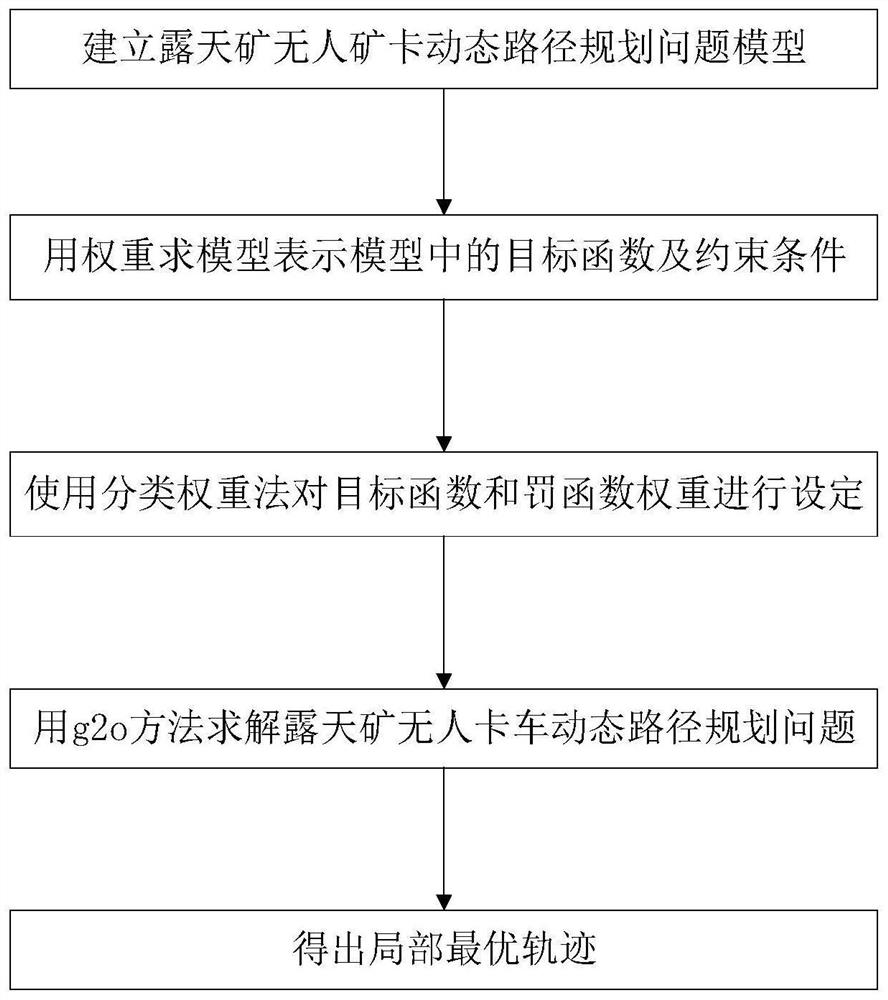
[0015] The present invention is an open-pit mine unmanned mine card dynamic path planning method based on the improved TEB method, and the dynamic path planning flow chart of the method is as follows figure 1 shown. It contains the following steps:
[0016] (1) Construction of TEB dynamic path planning model.
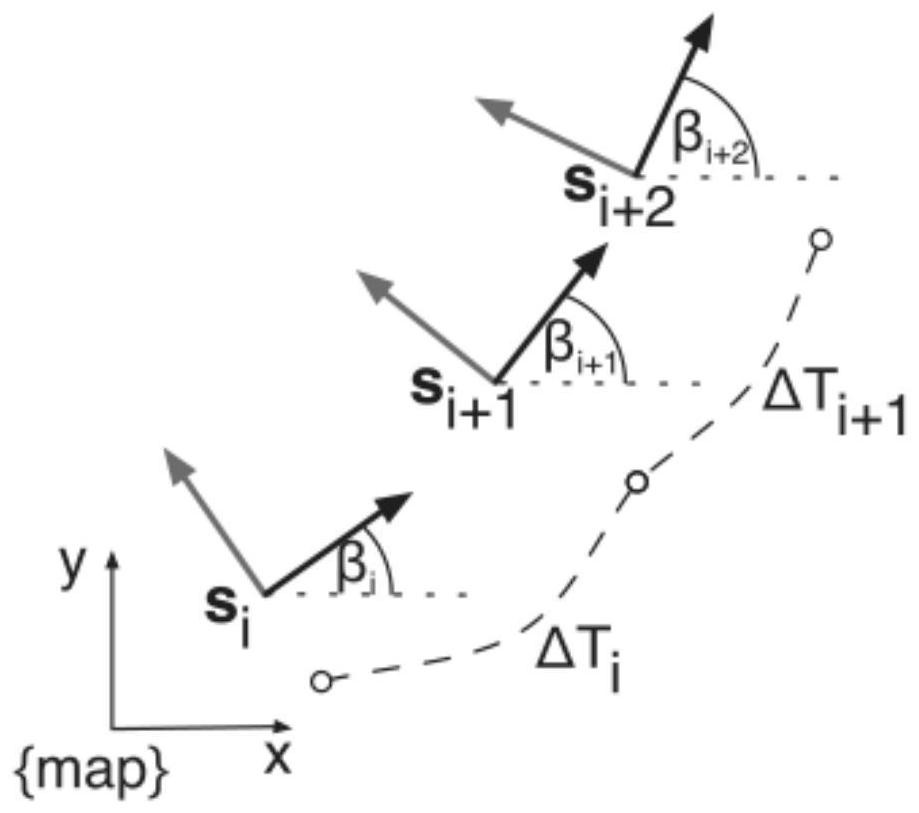
[0017] TEB abstracts the pose trajectory model on the path after the global planning of the mining truck into an elastic belt model with time information. Specifically, a plurality of control points controlling the shape of the elastic band (ie, the pose of the mining truck) are inserted into the global static trajectory known before dynamic path planning. In order to display the kinematic information of the trajectory, the points and Define time information between points, establish a rubber band model with time information, and then ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com