Ultra-low-speed crawling method for driverless cars under mixed road congestion
A technology for unmanned vehicles and congestion status, which is applied to vehicle components, input parameters of external conditions, control devices, etc., and can solve problems such as vehicle congestion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0057] Such as Figure 5 As shown, the vehicle enters the mixed road with the first vehicle speed V1 of 8 km / h, the second vehicle speed V2 of 6 km / h, the third vehicle speed V3 of 4 km / h, and the fourth vehicle speed V4 of 2 km / h h, the first safety distance b1 is 1 m, the second safety distance b2 is 0.5 m, and the third safety distance b3 is 0.3 m.
[0058] A1. The length S of the vehicle's pre-travel trajectory is 2m. Calculate the vehicle's pre-travel time T=S / V1=8 / 2=4s, and draw the vehicle's pre-envelope area. The range M is based on the vehicle's pre-envelope area. , The rectangular area formed after expanding to both sides with a distance of 2m, the system on the vehicle analyzes the pre-action trajectory of pedestrians and non-motor vehicles according to the vehicle's pre-travel time of 4s;
[0059] A2. Real-time judgment is made on the sum N of the number of pedestrians and non-motorized vehicles within the range M. There are 3 pedestrians within the range M, and t...
Embodiment 2
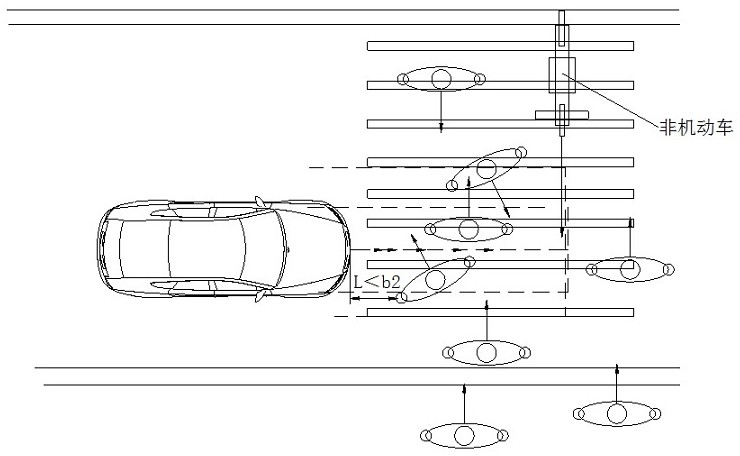
[0064] Such as Figure 7 As shown, the vehicle enters the mixed road with the first vehicle speed V1 of 8 km / h, the second vehicle speed V2 of 6 km / h, the third vehicle speed V3 of 4 km / h, and the fourth vehicle speed V4 of 2 km / h h, the first safety distance b1 is 1 m, the second safety distance b2 is 0.5 m, and the third safety distance b3 is 0.3 m.
[0065] After the vehicle is in ultra-low-speed creeping mode and continues to drive forward for a certain distance, the pedestrians below the range M are walking towards the vehicle, and they are the closest to the vehicle, and the minimum distance L is less than 0.5m at this time. The judgment process is in step A6: vehicle The environment recognition module of the environment recognition module captures the eyes of pedestrians, and the vehicle slows down to 4km / h and continues to drive forward. At this time, the vehicle can further reduce the speed to V4 and continue to drive. Vehicles can drive in a slower manner in areas w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com