Unmanned aerial vehicle mixing path planning method
A hybrid path, UAV technology, applied in the direction of finding the target control and other directions, can solve the problems of poor robustness, easy occurrence of obstacles, collisions, etc., to reduce the computational load and time-consuming effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0062] The UAV hybrid path planning method includes the following steps: (see the attached manual figure 1 )
[0063] 1. The EADA* algorithm is improved on the basis of the existing ADA* algorithm;
[0064] On the basis of the existing ADA* algorithm, the head sorting function is realized by adding the head sorting algorithm idea;
[0065] The specific steps to realize it are as follows:
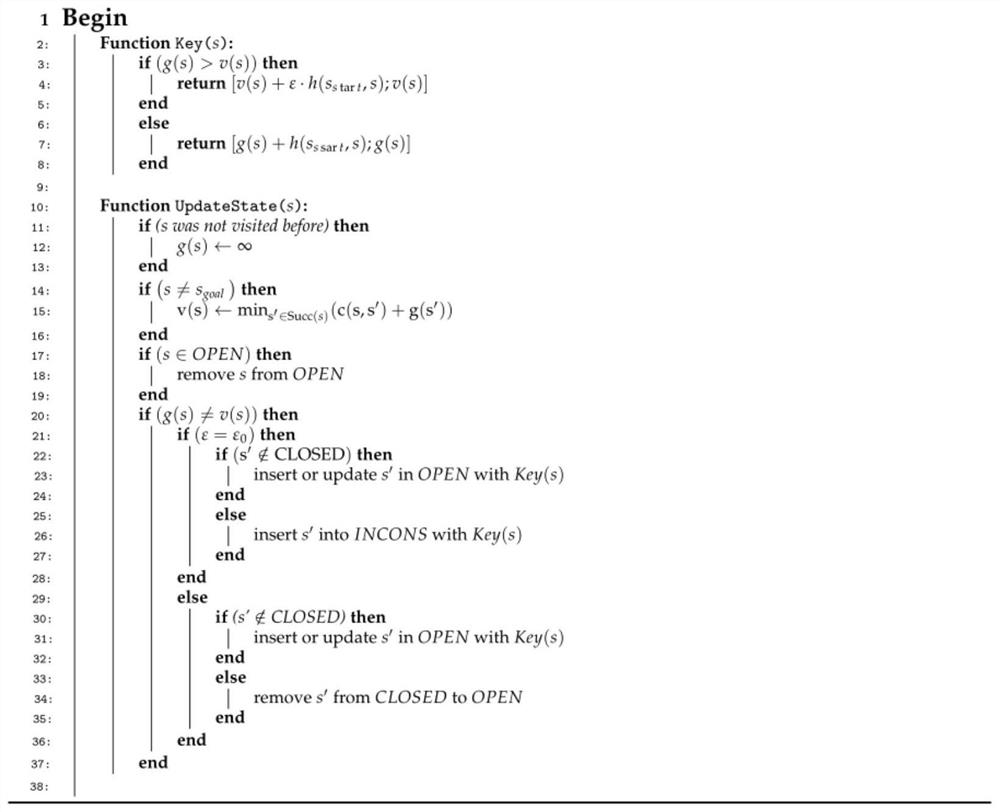
[0066] 1.1. In the initialization phase of the ADA* algorithm, set the value of ε to a larger value, greater than or equal to 2.0; create empty queues OPEN, CLOSED, INCONS and WALLS; except that the cost of the target in the path is 0, g(s) and The value of v(s) is set to infinity in all states;
[0067] 1.2. The starting state moves along the current suboptimal solution at the state speed of each iteration; in each iteration, Towards The target location moves; the pathfinding cycle continues until the body reaches the final target state, i.e. ;
[0068] 1.3. Calculate the cost of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com