Distribution method for aerial area reconnaissance tasks of unmanned aerial vehicle cluster
A task assignment, UAV technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of scattered reconnaissance area, uncertainty, and inapplicability of optimal task decision-making methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
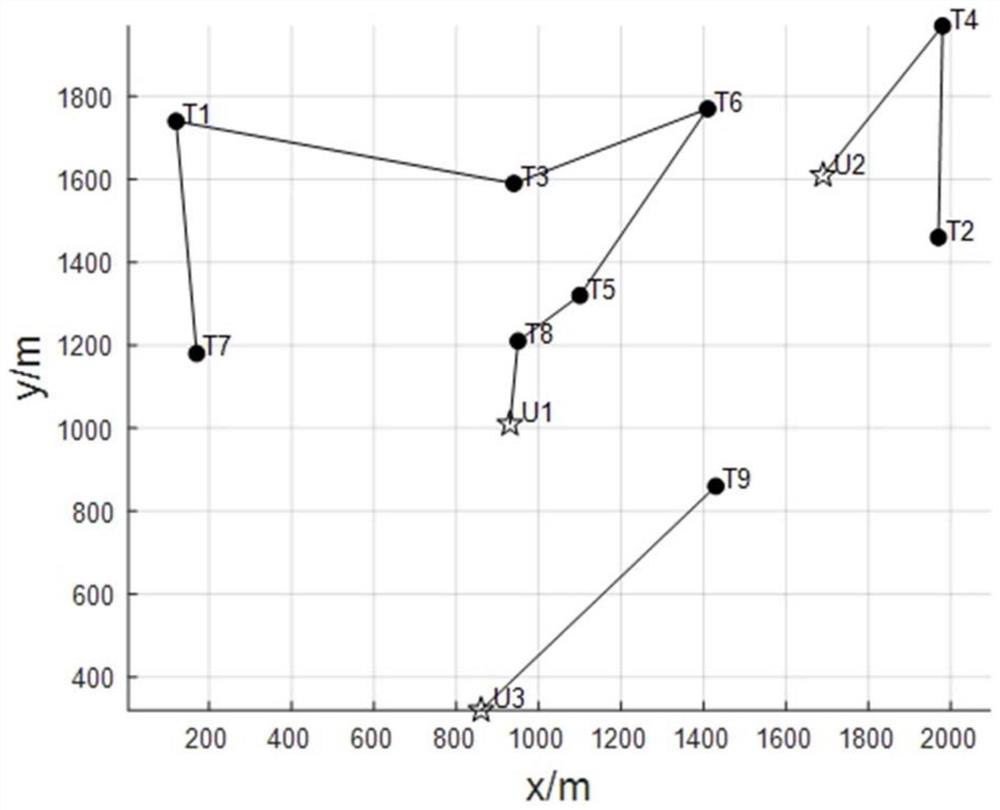
[0141] 3 UAVs carry out target reconnaissance mission assignments to 9 areas where targets are likely to exist within the range of 2000*2000m. The 3 UAVs carry the same sensitive components, numbered U1, U2, and U3, and their flight speeds are all 20m / s, the initial coordinates are (930,1010), (1690,1610), (860,320) respectively.
[0142] Reconnaissance area coordinates and probability μ j As shown in Table 1.
[0143] Table I
[0144] scout area label Reconnaissance area coordinates / km Probability μ j
T 1 (120,1740) 0.95 T 2 (1970,1460) 0.95 T 3 (940,1590) 0.95 T 4 (1980,1970) 0.95 T 5 (1100,1320) 0.90 T 6 (1410,1770) 0.90 T 7 (170,1180) 0.90 T 8 (950,1210) 0.90 T 9 (1430,860) 0.90
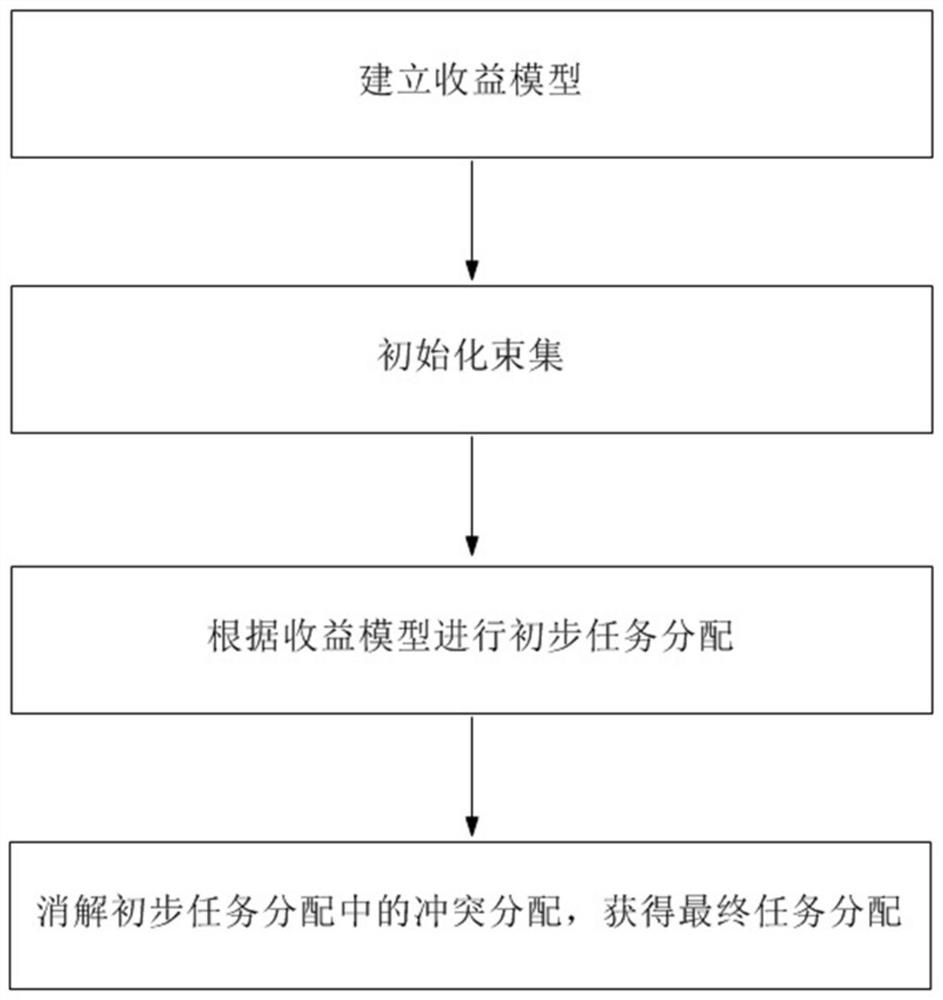
[0145] The allocation method proceeds in the following steps:
[0146] S1. Establish a revenue model;
[0147] S2. Initialize the bundle set;
[0148] S3. Preliminary task allocation according to the income model; ...
Embodiment 2
[0174] 4 UAVs assign target reconnaissance tasks to 20 areas where targets are likely to exist within a range of 500*500km.
[0175] Among them, the sensitive components carried by the UAV and their speed and position are shown in Table 2; the type and probability of the reconnaissance area μ j As shown in Table 3, the coordinates of the reconnaissance area are shown in Table 4.
[0176] Table II
[0177]
[0178] Table three
[0179]
[0180] Table four
[0181] label task area type Mission point coordinates / km label task area type Mission point coordinates / km T 1 Type I (219,376) T 11 Type II (138,420) T 2 Type I (191,128) T 12 Type II (340,127) T 3 Type I (383,253) T 13 Type II (328,407) T 4 Type I (398,350) T 14 Type II (81,122) T 5 Type I (93,445) T15 Type II (99,465) T 6 Type I (245.480) T 16 Type II (249,175) T 7 Type I (283,284) T 17 Type II (480,98) T 8 Type ...
experiment example 1
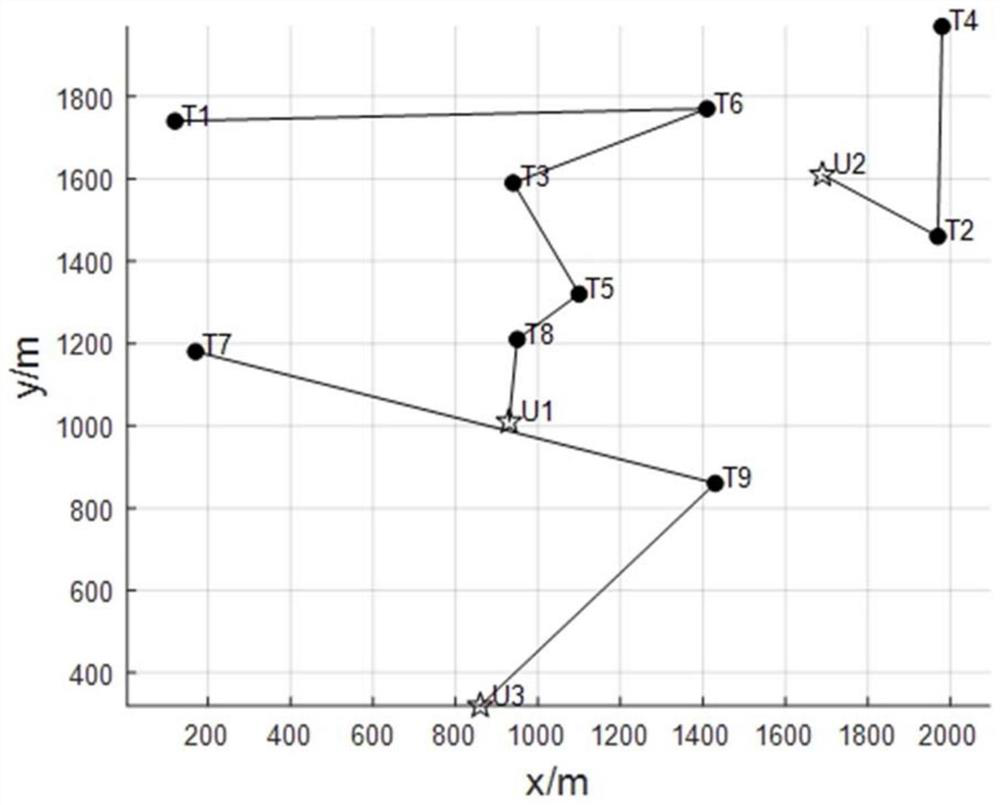
[0220] The result of comparative example 1 ( figure 2 ) and the results of Comparative Example 1 ( image 3 ), it can be clearly found that in the task allocation scheme formed in embodiment 1, the task path of each drone is closer to forming a closed loop, which is more convenient for the recovery of the drone, and it is easier for the drone to perform other subsequent tasks.
[0221] The result of comparative example 2 ( Figure 4 ) and the results of Comparative Example 2 ( Figure 5 ), it can be clearly found that Example 2 forms a task allocation scheme, and the task path of each UAV is closer to forming a closed loop. Compared with the task allocation in Comparative Example 2, the low recovery consumption of the UAV cluster is more practical Reconnaissance task assignment, at the same time, inter-machine communication and update time stamps, avoid multiple drones from performing similar tasks separately, and avoid repeated execution of tasks.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com