


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Simulation and control method, system and readable storage medium of lepidopteran insect model
A technology of Lepidoptera insects and control methods, which is applied in design optimization/simulation, animation production, instruments, etc., can solve problems such as large amount of calculation, poor bionic effect, insufficient realism, etc., and achieves good bionic effect and degree of simulation. High, strong bionic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
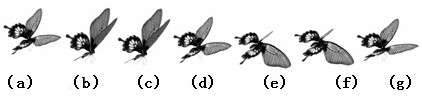
[0074] This embodiment is mainly used to introduce the simulation of a Lepidoptera insect model and the simulation part of the control method, which can describe the different postures of Lepidoptera insects in detail through individual control parameters; make the insect model more realistic and bionic Stronger; can include:
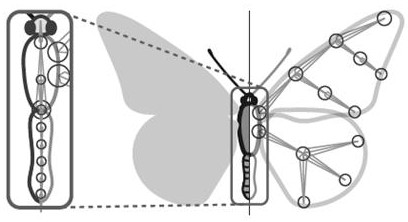
[0075] Based on the detailed size of the insect body, a virtual lepidopteran insect model is established using 3D mesh and hierarchical skeleton; the model includes n wings and gravity information, and multiple flight control angles are set based on the flight state characteristics of lepidopteran insects , the multiple flight control angles include: front wing and rear wing flapping angle θ γ , front wing rotation angle θ ζ , pitch angle θ β , front wing sweep angle θ Ψ and abdominal rotation angle θ φ The gravity information includes the mass of the model, the gravity and the coordinates of the center of gravity of the virtual Lepidoptera insect m...
Embodiment 2
[0080] On the basis of Embodiment 1, this embodiment mainly focuses on the simulation of butterflies and moths, and mainly selects two representative butterflies and a representative moth; , monarch butterfly (scientific name: Danaus plexippus) and hawkmoth (scientific name: Hawkmoth Manducasexta); Specifically, simulation experiments were carried out on a PC with Intel(R) Core(TM) I7-7700CPU, Geforce RTX2070GPU(8G), and 16GB memory; only GPU was used for rendering acceleration of the model, and GPU was used for parallel computing.
[0081] The mesh of the 3D butterfly model is composed of triangular patches. The 3D model of the monarch butterfly has 11814 vertices and 23334 triangles, and the 3D model of the swallowtail butterfly contains 16596 vertices and 16594 triangles. The butterfly model is mainly composed of five parts: head, chest, abdomen, front wing and rear wing; in order to simulate a more realistic butterfly, a hierarchical skeleton is designed for the butterfly ...
Embodiment 3
[0093] On the basis of embodiment 1, present embodiment is mainly used in introducing the flight control part in a kind of Lepidoptera insect model simulation and control method: the method comprises the steps:
[0094] Step 1: Create a virtual Lepidoptera insect model using the above method.
[0095] Step 2: Using the quasi-steady-state aerodynamic theory, solve the aerodynamic force F on the triangular surface of each three-dimensional mesh of the jth wing of the virtual lepidopteran insect model i,j , and put the aerodynamic force F on each triangular surface of the three-dimensional mesh on the jth wing i,j Perform superposition to get the aerodynamic force F on the jth wing j Solve the aerodynamic forces on the n wings of the virtual lepidopteran insect model in turn, sum to obtain the aerodynamic summation of the virtual lepidopteran insect model, and superimpose Perlin noise on the curl noise field to obtain the vortex force F vor .
[0096] Step 3: According to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com