


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A foot mechanism of a walking polar scientific research robot
A robot and walking technology, which is applied in the field of foot mechanism of walking polar scientific research robot, can solve the problems of inability to adapt to rough terrain, slow turning speed, and less degree of freedom of foot mechanism, so as to improve stability and pass through the environment Sexuality, reducing difficulty, and expanding the scope of scientific research
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
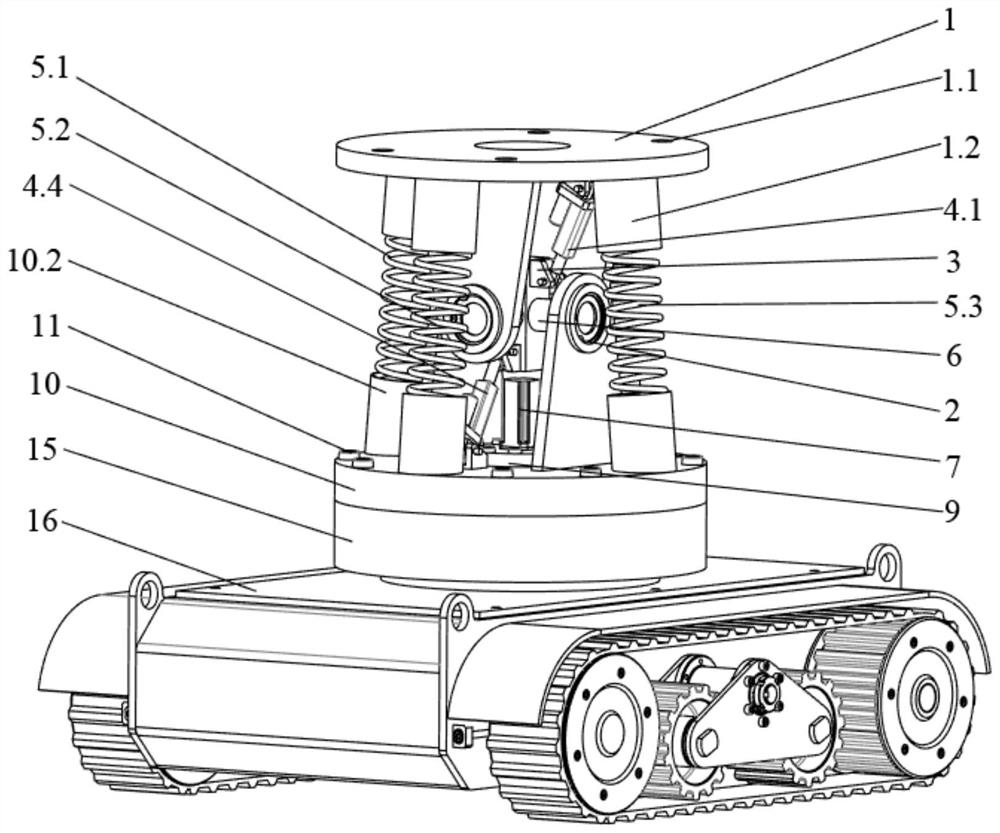
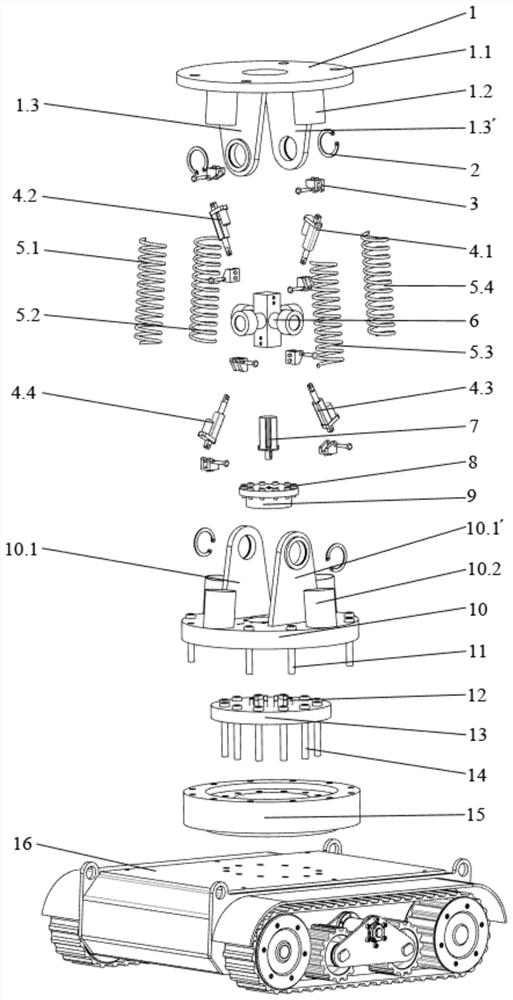
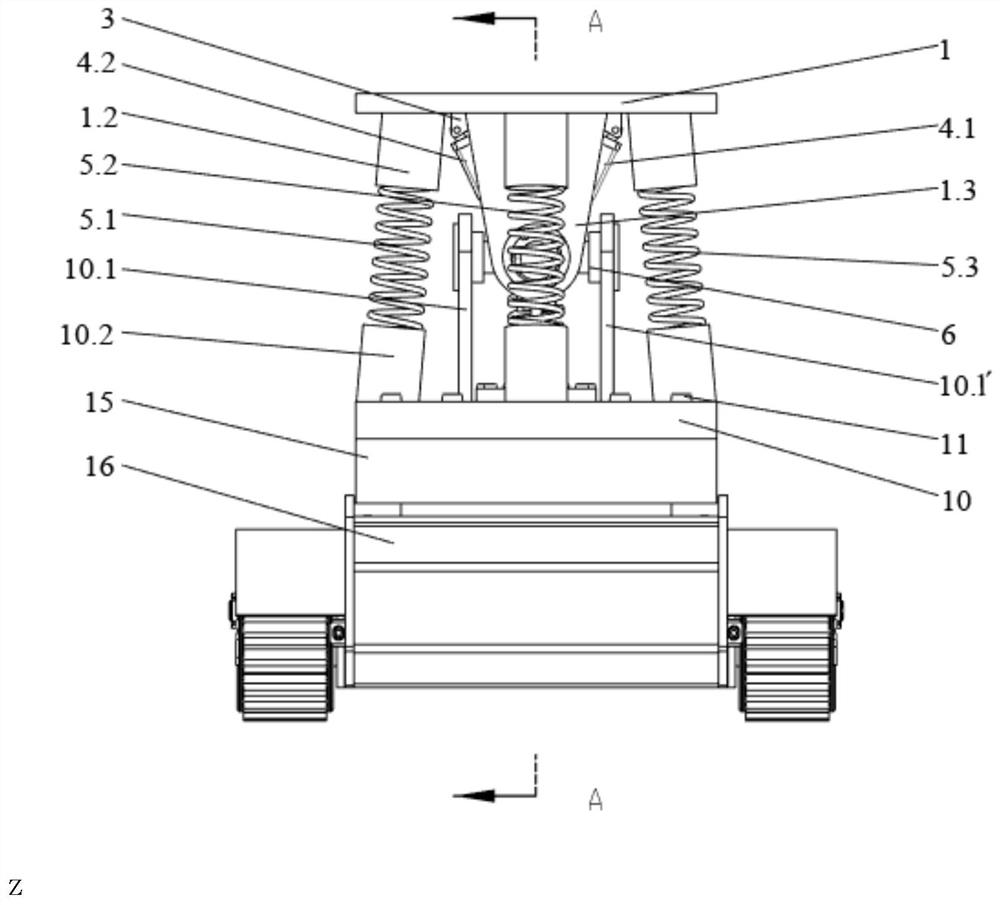
[0016] attached figure 1 , 2 , 3, 4, 5, 6, 7, 8, 9 are an embodiment of the present invention, and the foot mechanism control is characterized in that:
[0017] Active control of the foot mechanism: When the polar scientific research robot is driving on uneven snowy roads or encounters ice cracks, the robot moves in walking mode. This mode is to realize the robot movement by swinging the robot legs. The foot mechanism expands and contracts through four electric cylinders 4, and greatly adjusts the pitch and roll angles of the crawler chassis 16 to adapt to the terrain and improves the stability of the robot when driving; when the crawler foot mechanism sinks into the snow or falls into the ice When there is a crack, the crawler chassis 16 can be pitched, rolled and rotated to adjust the attitude of the crawler chassis 16 by driving the first, second, third and fourth electric cylinders 4.1, 4.2, 4.3, 4.4 and the servo motor 7 , to facilitate the crawler chassis to get out of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com