Driverless environment target detection method based on embedded equipment
An embedded device and target detection technology, applied in the field of unmanned vehicle environment perception, to achieve the effect of increasing speed, reducing the amount of calculation, and reducing the amount of parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0037] A kind of unmanned driving environment target detection method based on embedded equipment, the specific implementation scheme of this method is as follows figure 1 As shown, the specific content is as follows:
[0038] Step S10, using a high-resolution monocular camera pair to collect raw video data, the collected objects are common obstacle types in the unmanned driving environment, including cars, trucks, pedestrians, traffic signs, traffic lights, etc.
[0039] Step S20, data preprocessing.
[0040] Step S30, the data set is divided into a training set and a test set according to a ratio of 9:1.
[0041] Step S40, compiling the Darknet framework, using the Darknet-53 network as the basic network during training.
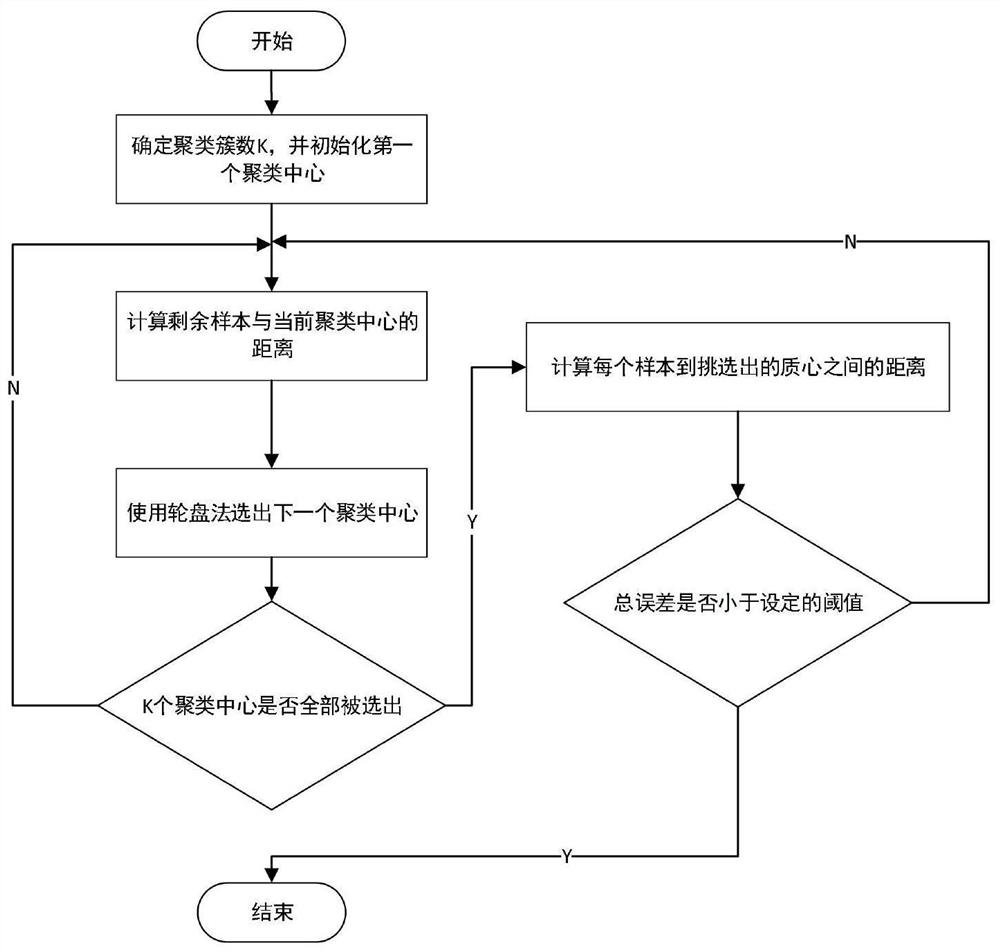
[0042] Step S50, using the improved K-Means++ algorithm to cluster the data set to obtain the optimal anchor frame scale sui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com