


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot scheduling method, device and equipment and storage medium
A scheduling method and robot technology, applied in the field of logistics, can solve the problems of robots unable to meet various distribution needs and low utilization rate of robots, and achieve the effect of saving input costs and improving utilization rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
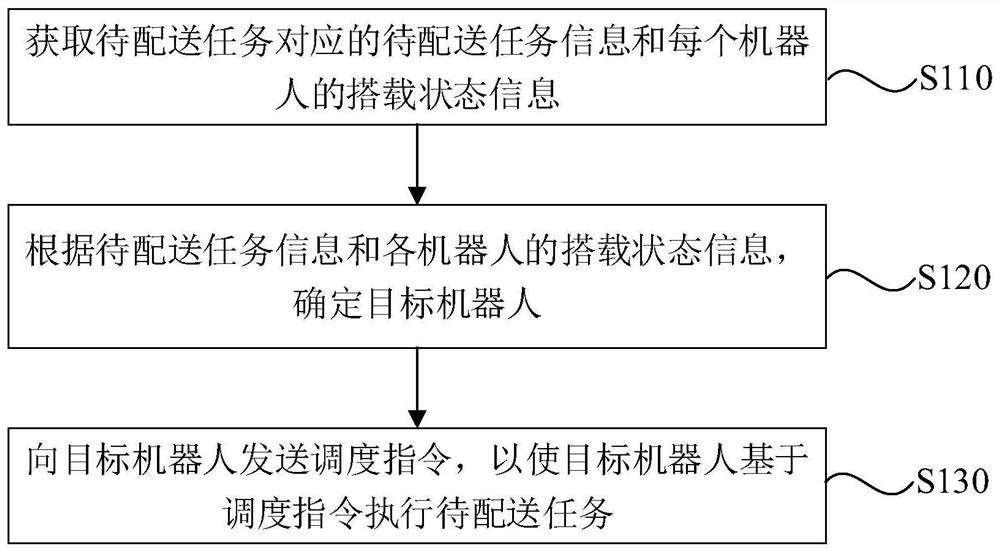
[0042] figure 1 It is a flowchart of a robot scheduling method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of scheduling robots that can carry different types of distribution boxes. This method can be executed by the robot scheduling device in the embodiment of the present invention. The device can be realized by means of software and / or hardware. The device can be integrated on the dispatching equipment. Scheduling equipment can be considered as a device that implements robot scheduling.
[0043] In the embodiment of the present invention, the robot can be matched with various types of distribution boxes, and the distribution boxes include: at least one type of storage cavity.
[0044] Exemplarily, the delivery box may include one box or multiple boxes, each box serves as a storage chamber, and each box may hold the same type of items or different types of items. Or the distribution box can be divided into multiple area...
Embodiment 2
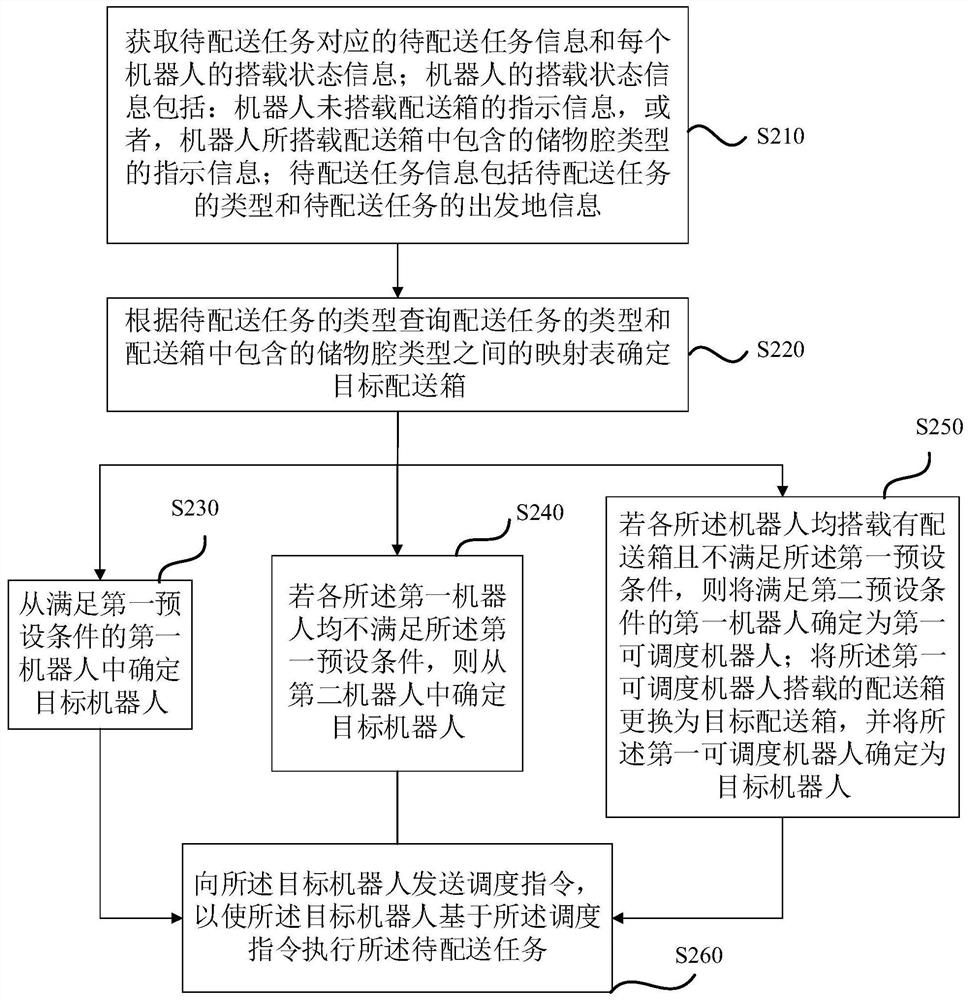
[0062] figure 2 It is a flow chart of a robot scheduling method in Embodiment 2 of the present invention. This embodiment is optimized based on the above embodiment. In this embodiment, the loading state information of the robot includes: the robot is not equipped with delivery The indication information of the box, or the indication information of the type of the storage cavity contained in the distribution box carried by the robot; the information on the task to be delivered includes the type of the task to be delivered and the origin information of the task to be delivered. Correspondingly, determining the target robot according to the information of the task to be delivered and the loading state information of each robot includes: querying the type of the delivery task and the storage cavity contained in the delivery box according to the type of the task to be delivered The mapping table between types determines the target distribution box, and the storage cavity type con...
Embodiment 3
[0111] image 3 It is a schematic structural diagram of a robot scheduling device provided by Embodiment 3 of the present invention. This embodiment is applicable to the situation of dispatching robots that can carry different types of distribution boxes. The device can be implemented in software and / or hardware, and the device can be integrated into any device that provides the function of robot dispatching, such as image 3 As shown, the apparatus for robot scheduling specifically includes: an acquisition module 310 , a determination module 320 and a sending module 330 .
[0112] Wherein, the acquiring module 310 is used to acquire the task information corresponding to the task to be delivered and the loading state information of each robot;
[0113] A determining module 320, configured to determine the target robot according to the information about the task to be delivered and the loading state information of each robot;
[0114] The sending module 330 is configured to s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com