A propeller hydraulic control system for an underwater robot
A hydraulic control system and underwater robot technology, applied in underwater ships, underwater operating equipment, motor vehicles, etc., can solve problems such as long time for robots to continue moving, damage to propellers, drifting and collision of underwater robots, etc., and achieve Avoid stretching and shrinking difficulties, improve balance stability, and facilitate use or transportation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
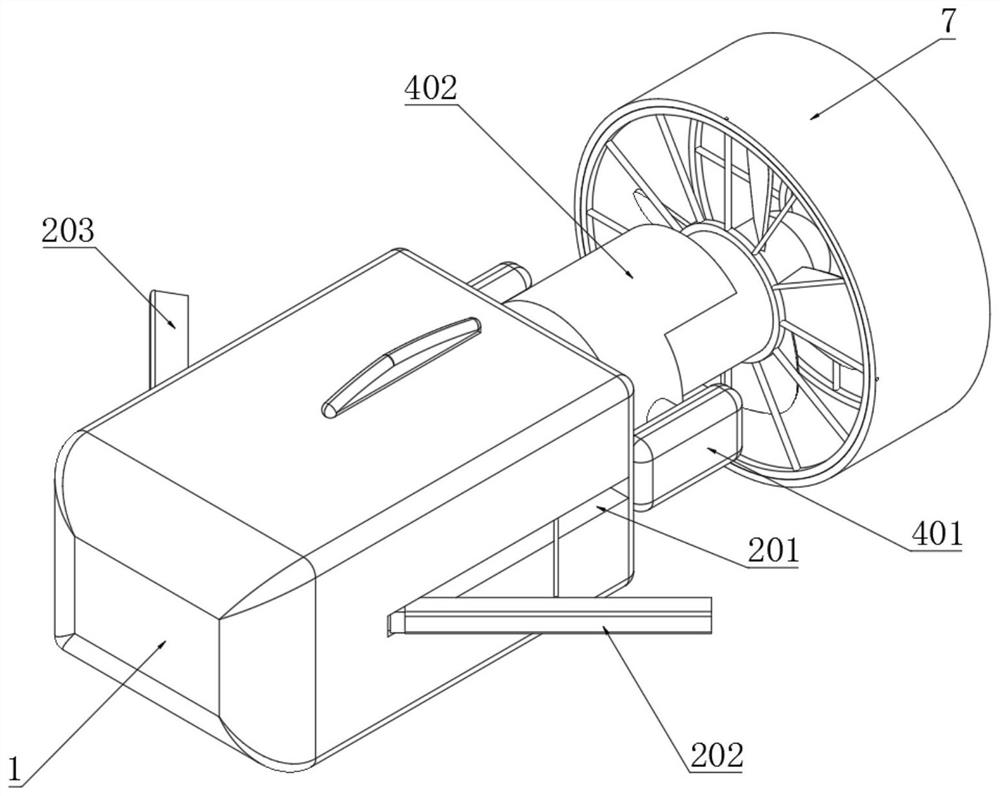
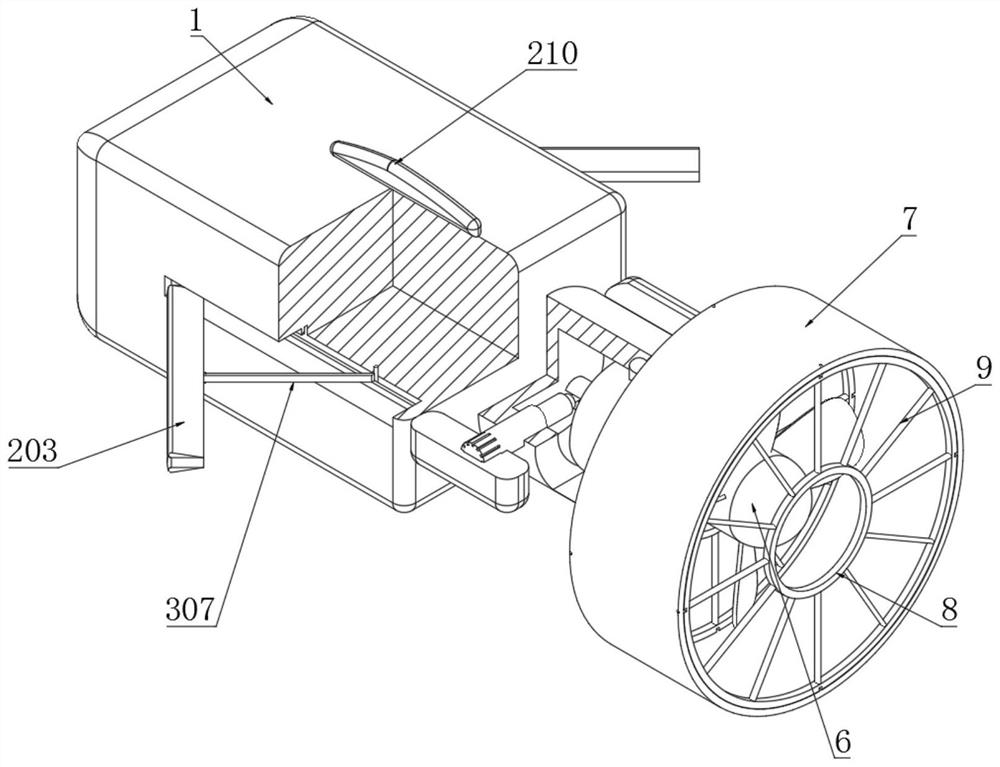
[0044] Example: such as Figure 1-8 As shown, the present invention provides a technical solution, a propeller hydraulic control system of an underwater robot, including a casing 1, which is convenient for the staff to maintain the balance and stability of the propeller when it moves, and also facilitates the staff to increase the propeller when the propeller stops. Movement resistance, which in turn facilitates the staff to reduce the drift distance after the propeller stops moving, thereby improving the balance and stability of the underwater robot. A balance mechanism 2 is installed inside the shell 1;
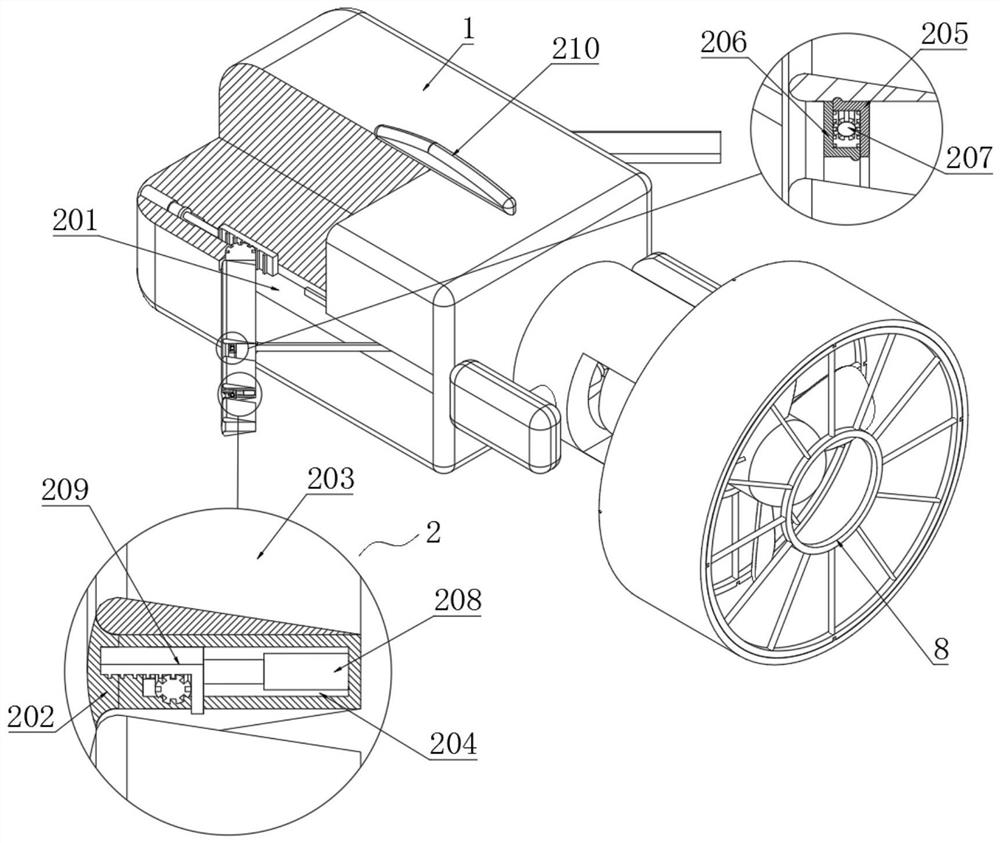
[0045] The balance mechanism 2 includes a rotating groove 201, a rotating fin 202, a spoiler 203, a groove 204, an upper top plate 205, a lower top plate 206, a co-directional transmission rod 207, a first electric telescopic rod 208, a steering bar 209 and a balance fin 210;
[0046] One side of the casing 1 is symmetrically provided with a rotating groove 201, and one sid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com