AUV (Autonomous Underwater Vehicle) dynamic integrated positioning method based on visual fusion
A positioning method and dynamic technology, applied in photo interpretation, image data processing, instruments, etc., can solve the problems of interference error, large fault tolerance rate, binocular vision loss rate, etc., to improve accuracy and fault tolerance rate, accurate positioning information , the effect of improving coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
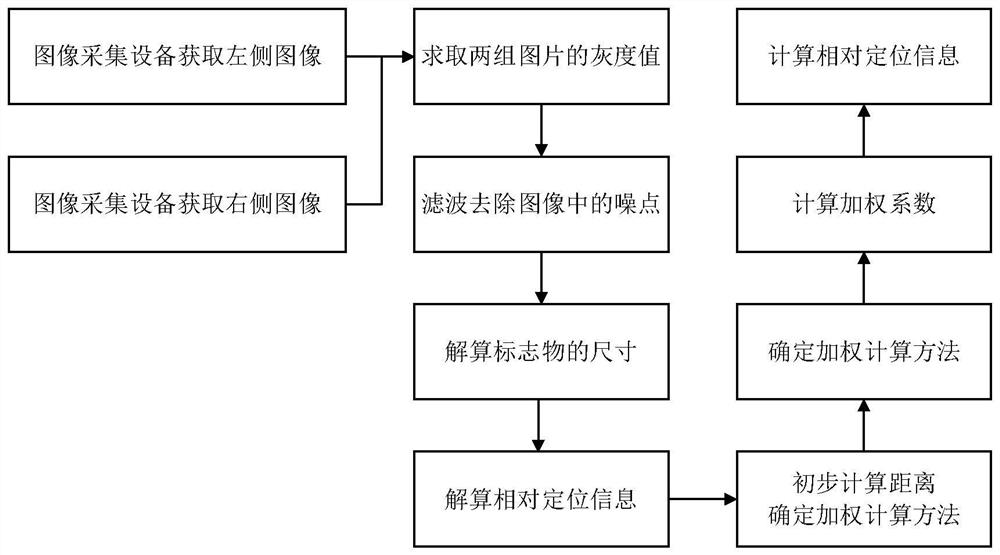
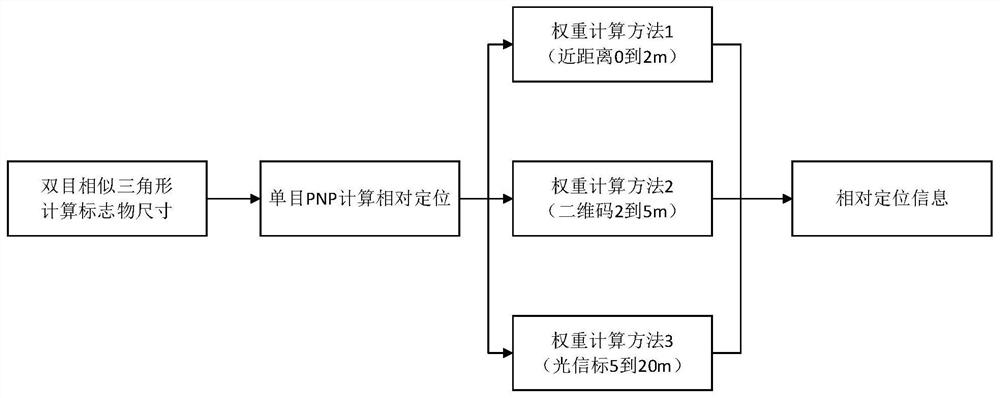
[0059] The AUV dynamic docking and positioning method based on visual fusion proposed by the present invention includes two processes of acquiring the size of markers and two sets of monocular vision fusion.
[0060] In the process of using monocular vision to identify markers and obtain relative positioning information, the size of the marker needs to be clearly known, and there is no way to correct this size during the algorithm calculation process; in the actual underwater environment, under the underwater light Influenced by other factors, there is a systematic error between the physical size of the markers measured on the shore and the size of the markers that need to be applied in the underwater environment, which affects the overall positioning.
[0061...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com